the Creative Commons Attribution 4.0 License.
the Creative Commons Attribution 4.0 License.
 | 21 Nov 2025
| 21 Nov 2025
Computing extreme storm surges in Europe using neural networks
Chiheb Ben Hammouda
Simon Treu
Timothy Tiggeloven
Anaïs Couasnon
Julius J. M. Busecke
Roderik S. W. van de Wal
Because of the computational costs of computing storm surges with hydrodynamic models, projections of changes in extreme storm surges are often based on small ensembles of climate model simulations. This may be resolved by using data-driven storm-surge models instead, which are computationally much cheaper to apply than hydrodynamic models. However, the potential performance of data-driven models at predicting extreme storm surges, which are underrepresented in observations, is unclear because previous studies did not train their models to specifically predict the extremes. Here, we investigate the performance of neural networks at predicting extreme storm surges at 9 tide-gauge stations in Europe when trained with a cost-sensitive learning approach based on the density of the observed storm surges. We find that density-based weighting improves both the error and timing of predictions of exceedances of the 99th percentile made with Long-Short-Term-Memory (LSTM) models, with the optimal degree of weighting depending on the location. At most locations, the performance of the neural networks also improves by exploiting spatiotemporal patterns in the input data with a convolutional LSTM (ConvLSTM) layer. The neural networks generally outperform an existing multi-linear regression model, and at the majority of locations, the performance of especially the ConvLSTM models approximates that of the hydrodynamic Global Tide and Surge Model. While the neural networks still predominantly underestimate the highest extreme storm surges, we conclude that addressing the imbalance in the training data through density-based weighting helps to improve the performance of neural networks at predicting the extremes and forms a step forward towards their use for climate projections.
- Article
(7964 KB) - Full-text XML
- BibTeX
- EndNote




Through strong winds and low atmospheric pressure, storms can cause abnormally high coastal water levels called storm surges. In Europe and elsewhere, storm surges have led to numerous coastal floods, some resulting in many casualties and substantial socioeconomic losses (Paprotny et al., 2018). Due to climate change, the frequency and height of extreme sea levels are expected to increase globally, primarily due to sea-level rise (Hermans et al., 2023; Jevrejeva et al., 2023; Vousdoukas et al., 2018). Although likely to a smaller extent, extreme sea levels may also change due to changes in atmospheric conditions driving storm surges (Vousdoukas et al., 2018; Muis et al., 2020, 2023; Shimura et al., 2022). However, projections of atmospherically driven changes in extreme storm surges are typically based on small ensembles of climate model simulations. Consequently, the uncertainties of these projections due to differences between climate models and internal climate variability are large (Muis et al., 2023; Hermans et al., 2024)
An important reason why projections of extreme storm surges are often based on only a few climate model simulations is that global climate models do not simulate storm surges reliably, if at all. Instead, the atmospheric changes simulated by climate models need to be translated to changes in storm surges with another model. Typically, computationally expensive, high-resolution hydrodynamic models are used for this (e.g. Vousdoukas et al., 2018; Muis et al., 2020, 2023; Shimura et al., 2022). However, data-driven storm-surge models based on regression, gradient boosting, neural networks and other machine learning techniques are emerging (see Qin et al., 2023, for a review) that, once trained, may be used as computationally cheaper alternatives to hydrodynamic models to translate climate model simulations to changes in storm surges.
So far, data-driven storm-surge models have primarily been used to predict short time series of local water levels or peak heights during specific events, using the characteristics of tropical cyclones traveling over the region as predictors (Ayyad et al., 2022; Lockwood et al., 2022; Ramos-Valle et al., 2021; Ian et al., 2023; Sun and Pan, 2023; Naeini and Snaiki, 2024, among others). Other studies have applied data-driven models to gridded atmospheric reanalysis data to reconstruct continuous time series of storm surges (Tausia et al., 2023; Cid et al., 2017, 2018; Tiggeloven et al., 2021; Bruneau et al., 2020; Tadesse et al., 2020; Tadesse and Wahl, 2021; Harter et al., 2024). In principle, these reconstructions can then be used for extreme-value analysis (Cid et al., 2018; Tiggeloven et al., 2021). However, previous studies did not specifically train their models to predict the extremes.
Compared to moderate storm surges, extreme storm surges are underrepresented in the training data. Without addressing this data imbalance during training, data-driven models may be biased toward more common events (Krawczyk, 2016). This could explain why existing data-driven models typically underestimate extreme storm surges (e.g. Tadesse et al., 2020; Tiggeloven et al., 2021; Harter et al., 2024), although limitations of the input data and the selection of predictor variables also play a role (Harter et al., 2024). Therefore, the potential performance of data-driven models at predicting extreme storm surges is still unclear. Furthermore, how neural networks compare to state-of-the-art hydrodynamic models in this regard also remains unclear, because most previous studies either did not specifically evaluate the extremes or considered extremes exceeding relatively low thresholds (e.g. Bruneau et al., 2020; Tadesse et al., 2020; Tiggeloven et al., 2021).
A second hurdle toward using data-driven models to project changes in extreme storm surges is their application to climate model simulations, which are typically provided at a lower resolution than the atmospheric reanalyses used by previous studies. For instance, the climate-model simulations from the High Resolution Model Intercomparison Project (Haarsma et al., 2016) that were used by Muis et al. (2023) to force their Global Tide and Surge Model (GTSM) have a spatial resolution comparable to the ERA5 atmospheric reanalysis (Hersbach et al., 2020), but are provided at a temporal frequency of 3 h at best. The simulations of other models participating in the Coupled Model Intercomparison Project 6 (Eyring et al., 2016) are typically also provided at a relatively low temporal resolution. Optimal model architectures and hyperparameter combinations that were found using hourly or more frequent observational training data may therefore not apply in the context of projecting changes in extreme storm surges.
In this study, we investigate how well neural networks can compute extreme storm surges based on atmospheric reanalysis data when the imbalance of moderate vs. extreme storm surges is addressed during model training. To address the imbalance, we use the cost-sensitive learning approach DenseLoss (Steininger et al., 2021) that weights the contribution of prediction errors to the training loss according to the rarity of their target observations, derived with kernel density estimation. Additionally, we trained the neural networks with 3-hourly observational data because of the underlying aim to eventually apply them to climate model simulations.
We analyzed 9 tide-gauge locations in western Europe, which are all subject to mainly extratropical cyclones, but vary in their oceanographic setting. We show how the performance of the neural networks at predicting extreme storm surges at these locations depends on how much additional weight rare data points are given, and whether the neural networks are designed to exploit only temporal or also spatiotemporal patterns in the input data. Additionally, we compare the performance of neural networks trained with and without density-based weighting to that of the multi-linear regression (MLR) model of Tadesse et al. (2020) and the hydrodynamic model GTSM (Muis et al., 2020, 2023).
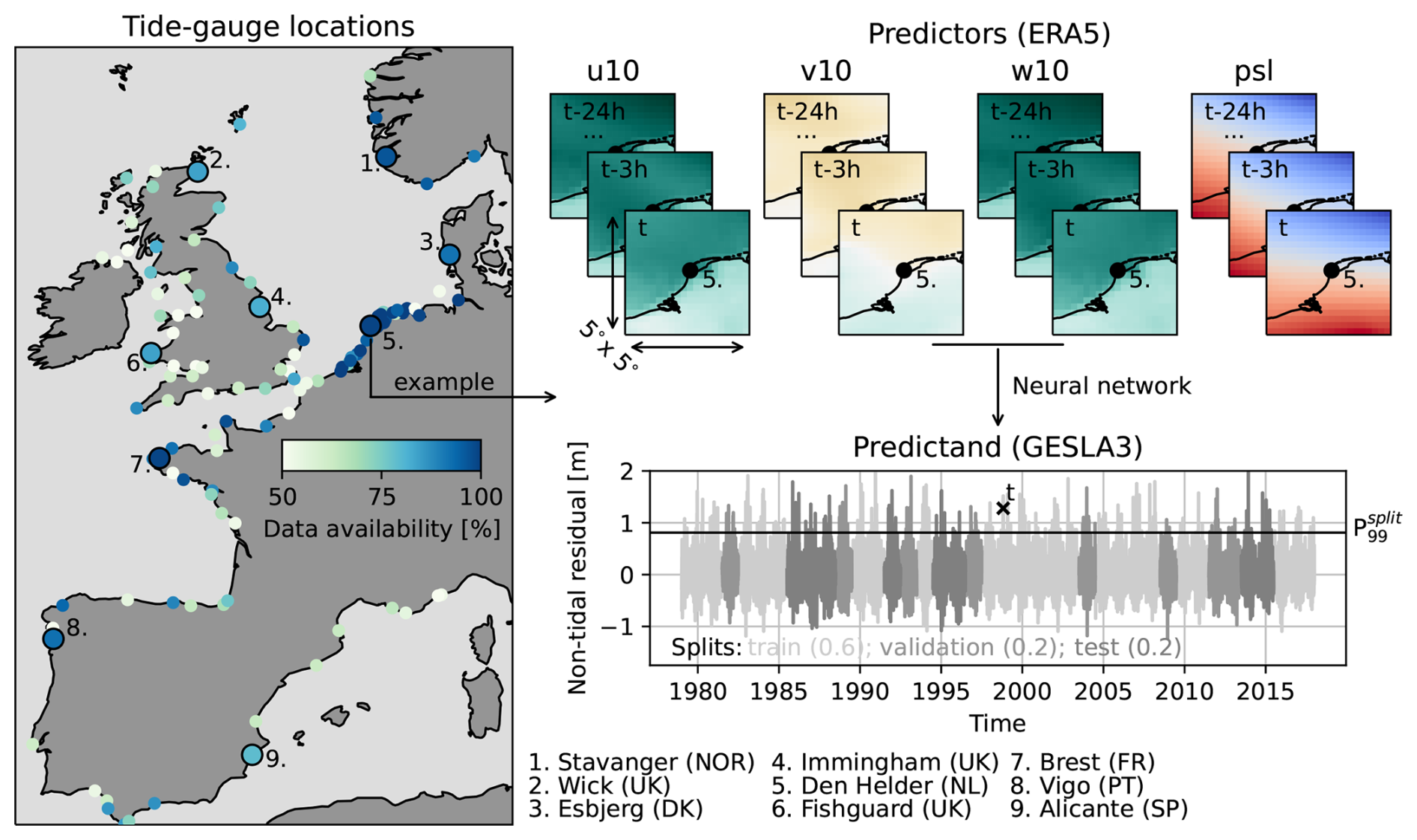
Figure 1Data availability (percentage of 3-hourly time steps with processable observations during 1979–2017) at European tide gauges with at least 20 years of observations, the 9 selected tide-gauge locations, and an example of the prediction of a non-tidal residual (referred to as storm surge) at an arbitrary time step t at location 5 (Den Helder, NL). The abbreviations u10, v10, and w10 stand for zonal, meridional and absolute wind speed at 10 m above the surface, respectively, and psl for the atmospheric pressure at sea level. The different shades of grey indicate how the full time series of storm surges is divided up into splits, and denotes the 99th percentile of all observed storm surges in a given split.
2.1 Data preparation
We trained neural networks to predict storm surges at multiple tide-gauge locations in western Europe, selected based on data availability and geographical coverage (see Fig. 1). Due to computational constraints, we limited our experiments to 9 tide gauges. While these may not be representative of all European coasts, they allow us to compare results across locations that are diverse in terms of shoreline orientation, dynamics, tidal regime and the magnitude and distribution of extremes. We limited our analysis to 1979–2017 because for that period, GTSM simulations are available for comparison (Muis et al., 2020). As predictands, we used hourly, quality-controlled tide-gauge observations from the GESLA3 database (Haigh et al., 2021). To derive non-tidal residuals (hereon referred to as storm surges) from the tide-gauge observations, we first subtracted annual means and then tides predicted through harmonic analysis performed with the T-Tide MATLAB package (Pawlowicz et al., 2002). Following Tadesse et al. (2020), we used 67 tidal constituents for the harmonic analysis, including only years of observations with at least 75 % data availability. While we verified the tidal amplitudes and phases that we estimated by comparing them with the estimates of Piccioni et al. (2019), the tide predictions are not perfect and residual tidal signals may remain despite our correction (Tiggeloven et al., 2021). However, to avoid smoothing out high-frequency surge variability, we did not attempt to remove potential residual tidal signals further by low-pass filtering.
As predictors, we used hourly data from the atmospheric reanalysis ERA5 (Hersbach et al., 2020). The explanatory variables we used are zonal, meridional and absolute wind speed at 10 m above the surface and atmospheric pressure at sea level. Absolute wind speed was included based on previous research that showed that including derived but physically meaningful predictor variables can provide added value (Tiggeloven et al., 2021). Our sensitivity tests at the tide gauge in Esbjerg, however, suggest only a minor influence (see Appendix A). To improve model efficiency, future work could therefore investigate whether absolute wind speed could be left out without substantially impacting model performance at other locations as well.
The predictor data was used in a box of 5° by 5° (20 by 20 grid cells) around each tide gauge (Fig. 1). This domain size was chosen as a compromise between computational costs and the approximate spatial scales at which we expect remote winds and sea-level pressure to be relevant. The predictor data includes grid cells over land, which do not directly affect water levels, but, as part of a certain weather pattern over a location, may contain features relevant for predicting storm surges. Furthermore, as shown by Fig. 1, the storm surge at time t was predicted using predictors at time t and up to 24 h prior, which was based on the assumption of a typical storm surge duration of approximately 48 h. Because of the look-back window, the predictor data used for predictions at consecutive 3-hourly time steps partially overlap. Sensitivity tests at Esbjerg suggest that these parameter choices are generally appropriate (see Appendix A), although we acknowledge that the optimal configuration of the predictor data may vary by location. As shown in Appendix A, using a look-back window, which several previous studies did not do (Bruneau et al., 2020; Tiggeloven et al., 2021; Harter et al., 2024), clearly provides added value.
Before training and evaluating the neural networks, we subtracted the annual means and mean seasonal cycle from both the predictand and predictor variables at each time step to avoid these signals from dominating what the models will learn. Additionally, we subsampled the hourly predictand and predictor data every 3 h to mimic the highest temporal frequency at which climate model simulations are typically provided (see Sect. 1). The time series were then split into non-overlapping train, validation and test portions containing 60 %, 20 % and 20 % of the available data, respectively (see Fig. 1). We used the train split to train the models, the validation split to evaluate training convergence and tune the hyperparameters of the models (further explained in Sect. 2.3), and the test split to evaluate model generalization to unseen data.
Because we observed that at some locations, chronological splitting led to a particularly uneven distribution of extreme storm surges over the different splits, we applied a simple stratified sampling scheme. This involved splitting the timeseries into years from July to June, stratifying the years based on the magnitude of the 99th percentile of storm surges (P99) in each year, and randomly assigning years from each stratum to the splits according to the aforementioned split-size ratios. Due to differences in tide-gauge data coverage between splits, the true split-size ratios can deviate from the nominal ones by up to a few percent (see Table B1). The randomness of the stratification was controlled with a seed. Finally, both the predictand and predictor data in each split were standardized by subtracting the mean and dividing by the standard deviation of the data in the train split. The predictions obtained with the standardized predictor data were back-transformed accordingly before evaluation.
2.2 LSTM and ConvLSTM models
For each location, we tested two neural network architectures: one with a long short-term memory (LSTM) layer and one with a convolutional LSTM (ConvLSTM) layer, both followed by three densely connected layers (see Fig. C1). An LSTM layer is a type of recurrent neural network that can capture temporal dependencies in sequential data (Hochreiter and Schmidhuber, 1997). A ConvLSTM layer is an LSTM layer in which internal operations are convolutional (Shi et al., 2015), and can therefore also capture spatiotemporal dependencies. These models are therefore well suited for the data described in Sect. 2.1. Our choice for these models is additionally motivated by the results of Tiggeloven et al. (2021), who found that LSTM models generally predict storm surges better than basic artificial neural networks, convolutional neural networks and ConvLSTM models. Since Tiggeloven et al. (2021) used predictors in a region of only 1.25 by 1.25° around each tide gauge, we additionally used the ConvLSTM model to test whether an LSTM model also outperforms a ConvLSTM model when using predictors in a 5 by 5° region. To develop the models, we largely followed the designs of Tiggeloven et al. (2021) but made a few tweaks that we found were beneficial for either model performance or efficiency. Both models were developed with the python-package TensorFlow (TensorFlow Developers, 2024). The software that we developed to train and evaluate the models is publicly available (Hermans, 2025b). Further details and flowcharts of the model architectures are provided in Appendix C.
2.3 Model training and hyperparameter tuning
Following previous studies (e.g. Bruneau et al., 2020; Tiggeloven et al., 2021), we trained our models separately at each tide gauge, with the commonly used mean square error (MSE) loss function. The MSE loss minimizes the mean of the squared differences between all predictions and observations, and while it therefore penalizes larger errors more than smaller errors, it does not directly address the underrepresentation of extremes in the training data. Therefore, we implemented the cost-sensitive learning approach DenseLoss (Steininger et al., 2021), which is an algorithm-level method that reweights the loss function based on the rarity of target values. In contrast to resampling methods such as Synthetic Minority Oversampling with Gaussian Noise (SMOGN; Branco et al., 2017), DenseLoss does not alter the training data through synthetic oversampling, and therefore retains the physical consistency of the high-dimensional training data that we use. Furthermore, with DenseLoss, the additional emphasis placed on rare samples can be controlled through a single interpretable hyperparameter and does not require an a-priori relevance definition. The DenseLoss scheme was implemented by multiplying each squared error between a prediction and an observation by a weight inversely proportional to the density of the observation obtained through kernel density estimation. The density-based weights are given by fw:
in which y is the observation, p(y) is the normalized density function of the observations, ϵ is a positive, real-valued constant (10−6) that clips the weights of observations with the highest densities to a non-zero value, and α is a hyperparameter controlling the strength of the density-based weighting (the higher α, the stronger the weighting). Here, we test α values of 0 (no weighting), 1, 3, and 5. Figure D1 shows an example of the corresponding density-based weights of standardized observations in the train split at Den Helder (NL). We refer to (Steininger et al., 2021) for further details of the DenseLoss method and their benchmark of its performance against SMOGN.
Like Bruneau et al. (2020), Tiggeloven et al. (2021), and Harter et al. (2024), we trained our models using Adam optimization (Kingma and Ba, 2017). We used a maximum of 100 training epochs and stopped training if the loss of the validation split did not further decrease during 10 consecutive epochs. The maximum number of epochs was reached for only 5 %–6 % of all LSTM and ConvLSTM models, and based on the small decrements in the validation loss near the end of the training of these models, we do not expect that using a maximum of more than 100 training epochs would substantially improve our results. The network weights corresponding to the epoch with the lowest validation loss were stored. Based on preliminary tests, we used a batch size of 128 time steps (16 d).
Due to the dimensions of the training data, extensive tuning of all hyperparameters was too computationally costly, especially for the ConvLSTM model. Therefore, we kept most hyperparameters of the model architectures defined in Appendix C constant except for the learning and dropout rates, which influenced the evolution of the training and validation loss the most. We varied the learning rate between 1e−5, 5e−5, and 1e−4 and the dropout rate between 0.1 and 0.2. As a dropout rate of 0.2 did not lead to a structurally better generalization of the models to the independent test split than a dropout rate of 0.1, we did not increase the dropout rate beyond 0.2. Combined with the 4 different values of α, this resulted in 24 unique sets of hyperparameters. To save computation time, we trained the LSTM models with all 24 settings, but the ConvLSTM model only with α=5, informed by the results for the LSTM models (see Sect. 3.1). Additionally, to account for variance in the results due to randomness in the initialization and optimization of model weights, we trained the models 5 times with each set of hyperparameters.
2.4 Performance evaluation
As discussed in Sect. 2.1, we evaluated the LSTM and ConvLSTM models using their predictions in the validation and test splits. For each split, we computed the root mean square error (RMSE) between the predictions and observations, considering only the time steps in that split at which the observed storm surges are extreme. We defined extremes using the 99th percentile in each split () as a threshold (see Table B1 for their magnitudes). Additionally, we only included exceedances of these thresholds if they were part of an event consisting of at least two exceedances within a time span of 12 h. This was done to avoid including exceedances potentially primarily arising from dominant semi-diurnal tidal signals that may not have been fully removed with the harmonic analysis explained in Sect. 2.1. We treated remaining threshold exceedances independently regardless of whether they occurred during the same event, because this allows the neural networks to learn about the temporal evolution of storm surges, and uniquely capturing storm surges through declustering would reduce the available sample size unless more moderate events would be considered. The numbers of filtered exceedances in each split are shown in Table B1. We refer to the resulting root mean square error as .
The conveys the error of predictions of observed extremes in a split regardless of whether the predictions are extreme. As falsely predicted extremes would also be included in an extreme-value analysis of the predictions, we additionally evaluated whether extremes are predicted at the right time. To do so, we used as a threshold to count the number of false positive (#FPs), false negative (#FNs), true positive (#TPs), and true negative (#TNs) predictions in each split. We then computed the corresponding F1 score, which ranges from 0 to 1, by taking the harmonic mean of the precision () and recall ():
To place the performance of the neural networks in perspective, we also computed the error metrics introduced above for the predictions of the MLR model of Tadesse et al. (2020), which uses empirical orthogonal functions (EOFs) of gridded sea-level pressure and zonal and meridional near-surface winds as predictors. We trained the MLR model with the same ERA5 data used to train the neural networks except that we had to reduce the size of the predictor data from 5 by 5 to 4.5 by 4.5° around each tide gauge to manage the dimension constraints of the principal-component analysis of SciPy. This may lead to a moderately lower performance (Tadesse and Wahl, 2021).
Additionally, we compared the performance of the data-driven models to that of GTSMv3.0 (Muis et al., 2020, 2023), which is a global, state-of-the-art hydrodynamic model that was also foced with sea-level pressure and surface winds from ERA5. We derived the error metrics for GTSM from the separately provided surge component of its simulations. We used the simulations of Muis et al. (2020) instead of Muis et al. (2023) because these consistently agreed better with the observations. A limitation of the comparison with GTSM is that we trained the data-driven models with 3-hourly ERA5 data (see Sect. 2.1), but simulations of GTSM are only available forced with hourly instead of 3-hourly ERA5 data. As atmospheric forcing with a lower temporal resolution reduces the accuracy of storm surge models (Agulles et al., 2024), our comparison is biased towards GTSM in this regard. We will consider this for the interpretation of our results in the following sections.
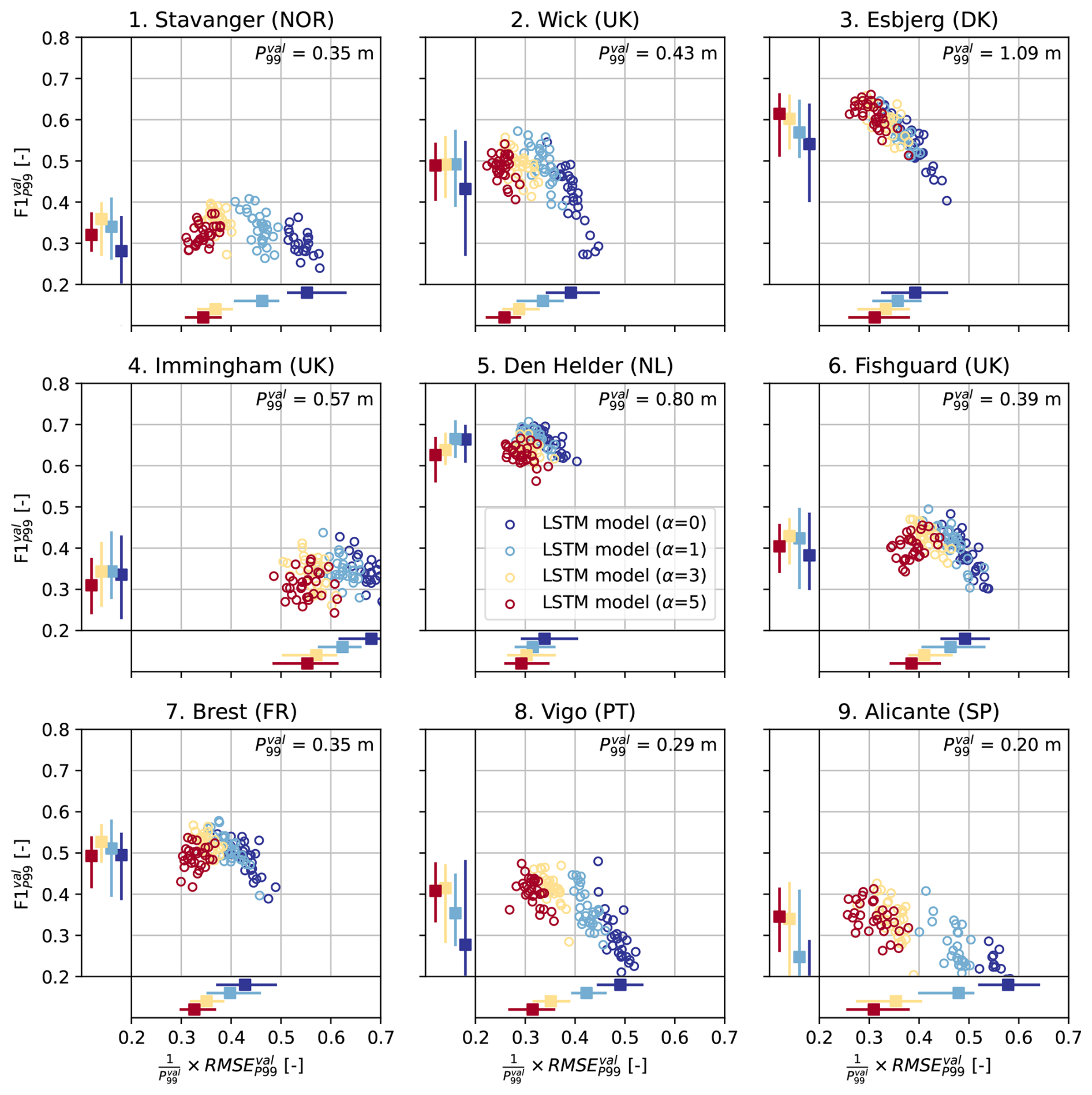
Figure 2Scatter plots of the root mean square error of predictions of the extreme storm surges observed in the validation split, relative to the 99th percentile of all observations in the validation split ( ) [–], vs. the F1 score of predictions in the validation split evaluated using () [–], for each tide-gauge location. Each circle denotes these error metrics for an individual LSTM model. The colors indicate the different values of α (0, 1, 3 or 5) used to train each LSTM model (30 LSTM models per α per location, as explained in Sect. 2.3). The bars on the bottom and left sides of each panel denote the minimum, median and maximum relative and of the LSTM models for each α, respectively. The value of is shown in the upper right corners.
3.1 Effect of density-based weighting on LSTM models
Figure 2 shows the RMSE of the predictions of extreme observations vs. the F1 score in the validation split ( vs. ), for each tide-gauge location. Each circle denotes these error metrics for an individual LSTM model. The is displayed relative to the magnitude of the 99th percentile () at each location so that it can directly be compared between locations. Depending on the location, the minimum among the LSTM models trained without density-based weighting (α=0, dark blue) ranges from 0.29 to 0.62 times . Immingham stands out as a location at which the LSTM models have a relatively high . Density-based weighting clearly reduces the of the LSTM models at all locations (Fig. 2). Furthermore, LSTM models trained with a higher α value (higher degree of weighting) tend to have a lower , as seen by the gradient of dark blue circles (α=0) on the right to red circles (α=5) on the left of each plot.
While among all tested values, α=5 leads to the lowest at each location, the improvement obtained through density-based weighting differs between locations (e.g. compare Stavanger to Den Helder). On average, increasing α from 0 to 5 reduces the minimum by 29 %. The minimum for α=5 ranges from 0.22 to 0.34 times at all locations except Immingham, where the minimum equals 0.49 times . As seen by the bars at the bottom of each panel in Fig. 2, the spread in the among LSTM models with the same α is typically between 0.07–0.15 times , depending on the location and on α.
Density-based weighting also influences the score of the LSTMs models. The maximum score of models trained without density-based weighting (α=0) ranges from 0.29 at Alicante to 0.70 at Den Helder (Fig. 2). Increasing α from 0 (dark blue) to 1 (light blue) improves the median at all locations and the maximum somewhat at most locations. However, increasing α further has a mixed effect. For instance, at Esbjerg and Alicante, training with α=5 leads to the highest , while at other locations, α=1 or 3 leads to the highest (Fig. 2).
In general, the effect of density-based weighting on is moderate: on average, the maximum score of LSTM models trained with density-based weighting (α=1, 3 or 5) is 9 % higher than the maximum score obtained without density-based weighting (α=0). The effect of α on the F1 score results from the partial compensation between the precision and the recall of the LSTM models, which depend on α oppositely (see Fig. D2). Namely, increasing the density-based weights generally leads to a higher recall but a lower precision (i.e. fewer false negatives but more false positives), similar to the forecaster's dilemma (Lerch et al., 2017). While Fig. 2 suggests that increasing α beyond 5 may reduce the even further, this will therefore likely lead to less precise predictions of extreme storm surges, which may negatively influence subsequent extreme-value analyses.
In conclusion, density-based weighting improves the performance of the LSTM models at predicting extremes at all locations, at least with an α value of 1. Our finding that using DenseLoss can improve both and suggests that reweighting the loss function does not simply reduce prediction errors of a few specific outliers but improves to the models' overall representation of extremes. However, the optimal α value depends on both the location and the metric to optimize, and therefore needs to be tuned. Finally, we note that while density-based weighting may improve the performance of the LSTM models at predicting extremes, it reduces their performance at predicting moderate observations by construction. Depending on the intended application of the neural networks, this may also need to be considered.
3.2 Comparison between models
Next, we compare the performance of the LSTM models with that of (1) the ConvLSTM model, (2) the MLR model of Tadesse et al. (2020), and (3) the hydrodynamic model GTSM (Muis et al., 2020). To this end, Fig. 3 shows the same error metrics as Fig. 2, but only for the best LSTM models for each α (colored circles). These were selected based on the highest sum of the model's rankings for and , separately for each location. The best ConvLSTM models were selected in the same way (trained only with α=5; black-edged red squares).
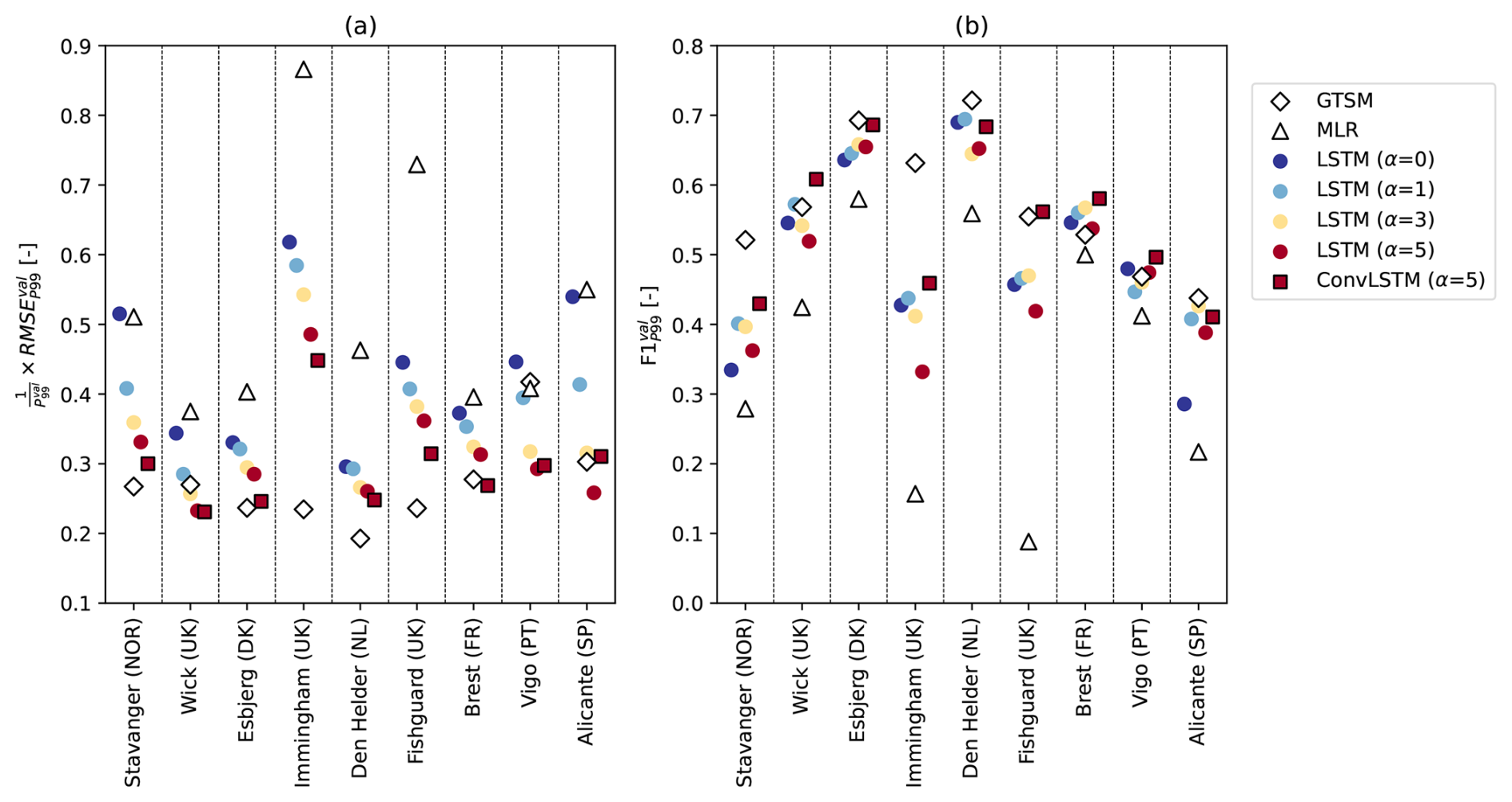
Figure 3(a) relative to [–] and (b) [–], for the best overall performing LSTM models for each α (colored circles), the best overall performing ConvLSTM model for α=5 (black-edged red squares), the MLR model of Tadesse et al. (2020) (white triangles), and the hydrodynamic model GTSM (Muis et al., 2020) (white diamonds), at every tide-gauge location.
First, we find that the selected LSTM models have a higher than the selected ConvLSTM models at all locations except at Vigo and Alicante (Fig. 3a), and a lower at all locations (Fig. 3b), at least for α=5. Using a ConvLSTM layer instead of an LSTM layer leads to an average improvement in the and of 5 % and 12 %, respectively. The finding that the ConvLSTM model outperforms the LSTM model at most locations indicates that exploiting spatiotemporal patterns in the input data is generally beneficial for predicting extreme storm surges.
Second, Fig. 3a shows that at all locations, the LSTM models trained with density-based weights have a lower than the MLR model of Tadesse et al. (2020) (white triangles). The LSTM models trained without density-based weights (α=0; dark blue circles) also have an similar to or lower than the MLR model, except at Vigo. Furthermore, the score of the LSTM models is higher than that of the MLR model at all locations, regardless of α (Fig. 3b). These results suggest that the non-linear relations between extreme storm surges and atmospheric predictors that the LSTM models capture, but the MLR model cannot, are important to consider. The difference in the performance between the LSTM- and MLR models may partially be reduced by using wind stress instead of wind speed as a predictor because wind stress is related to surge more linearly (Harter et al., 2024). Like for the LSTM models, the performance of the MLR model may also be improved by incorporating density-based weighting in its optimization, but we did not test this.
Third, the selected LSTM models have a higher than the hydrodynamic model GTSM (white diamonds) at all locations except Wick, Vigo and Alicante, and a lower at all locations except Brest and Vigo, regardless of α (Fig. 3a and b). On average, GTSM has an approximately 9 % lower than the minimum and a 9 % higher than the maximum of the LSTM models. Hence, we conclude that at the majority of locations, a state-of-the-art numerical model like GTSM outperforms relatively simple neural networks like the LSTM models, although the hourly instead of 3-hourly atmospheric forcing that was used to drive GTSM (see Sect. 2.4) may also help. Especially at Immingham, GTSM performs relatively well while the LSTM models perform relatively poorly (Fig. 3), indicating that the LSTM models have poorly learned the existing relationship between the predictors and the extreme storm surges at that location.
Finally, since the ConvLSTM models outperformed the LSTM models at most locations, we find that the ConvLSTM models perform more similarly to GTSM than the LSTM models (Fig. 3). Except at Stavanger and Immingham, the performance of the ConvLSTM models trained with α=5 closely approaches or even exceeds that of GTSM. The average relative differences in the and between the best ConvLSTM models and GTSM at these 7 locations are marginal. Hence, based on these evaluation metrics, the ConvLSTM model may be a viable alternative to state-of-the-art hydrodynamic models.
3.3 Model generalization
So far, we only considered how well the different models perform in the validation split. In this section, we also evaluate how well the models generalize. To do so, we compare the error metrics in the validation and test splits (Fig. 4), the latter of which was completely held back during model training. Figure 4a shows that the relative and of the LSTM- and ConvLSTM models (colored circles and squares, respectively) lie close to the 1:1 line at all locations except Alicante (lightblue). This suggests that except at Alicante, the neural networks apply to unseen data relatively well in terms of their error, which is further corroborated by high correlations between the and across models at individual locations. Additionally, we find that increasing α leads to a lower RMSEP99 in both the validation and test splits (Fig. D3). The MLR model and GTSM show similar behavior, as shown by the colored triangles and diamonds in Fig. 4a, respectively.
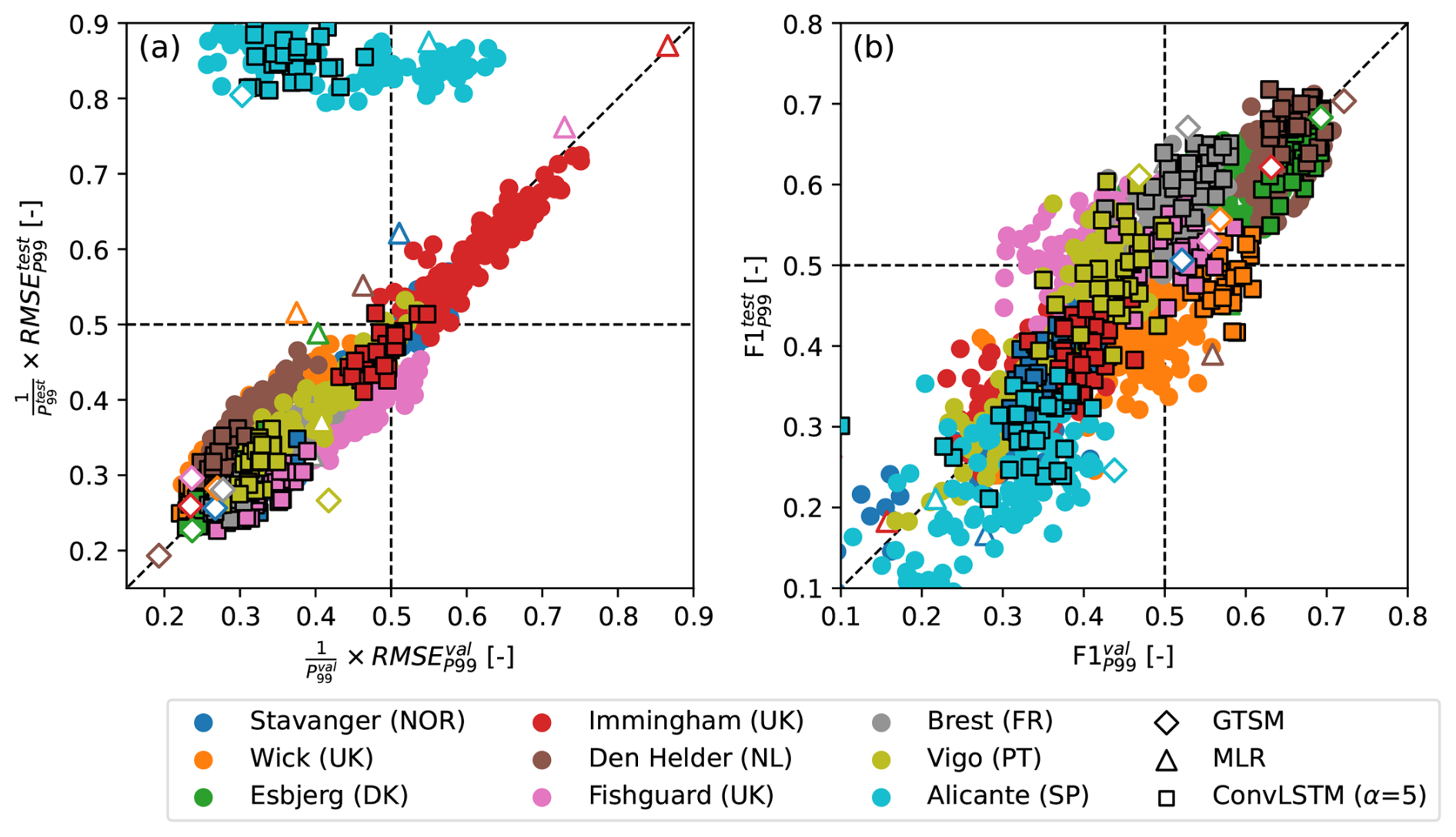
Figure 4Scatter plots of (a) RMSEP99 relative to P99 [–] in the validation split vs. in the test split and (b) F1P99 [–] in the validation split vs. in the test split, for the LSTM models (circles), ConvLSTM models (black-edged squares), the MLR model of Tadesse et al. (2020) (triangles), and GTSM (Muis et al., 2020) (diamonds). Each marker denotes the error metrics of an individual model, and the colors represent the different tide-gauge locations. The diagonal lines indicate equal error metrics in the validation and test splits.
The and scores of all models also lie relatively close to the 1:1 line at most locations (Fig. 4b), again suggesting that the models generalize reasonably well. However, the spread in the F1 scores is larger (as also seen in Fig. 2) and the correlation between and across the neural networks at each location is, although still visible and significant, lower than between and . With a few exceptions, increasing α has an approximately similar effect on as it has on (Fig. D3).
To some extent, differences between and , and and , are expected because these error metrics depend on a relatively small number of extreme events (see Table B1) that are not identically distributed in the relatively short validation and test splits (<8 years each). For optimal model generalization, we therefore recommend tuning α alongside other important (hyper)parameters using k fold cross-validation. The differences between the splits also affect how the performances of the different models compare. For instance, at Fishguard (pink) and Brest (grey), the minimum of the ConvLSTM models is slightly higher than that of GTSM, while the minimum is slightly lower (Fig. 4a). However, the discrepancy between and is exceptionally large at Alicante. Strikingly, this is the case for both the data-driven models and GTSM (Fig. 4a). Given that the same atmospheric forcing was used for all models, this suggests that at Alicante, the extent to which the observed extremes can be explained by wind- and pressure-driven surges differs substantially between the validation and test splits. Potential reasons for this will be discussed in Sect. 4.
3.4 Underestimation of the highest extremes in the test split
To further investigate the performance of the neural networks at predicting extremes in the test split, we zoom in on the 6 locations at which the and of the ConvLSTM models and GTSM are comparable (Sect. 3.2) and the models generalize well (Sect. 3.3): Wick, Esbjerg, Den Helder, Fishguard, Brest and Vigo. We find that overall, like in the validation split, the ConvLSTM models (orange) and GTSM (grey) have similar errors in the test split (average difference of 0.01 in the relative to ), whereas the LSTM models (blue) consistently have a higher error (Fig. 5a). However, despite their similar , the ConvLSTM models and GTSM have a different error distribution. Namely, the ConvLSTM models predominantly underestimate the observed extremes at all locations, while GTSM overestimates more than half of the observed extremes at Wick, Fishguard and Brest (Fig. 5b).
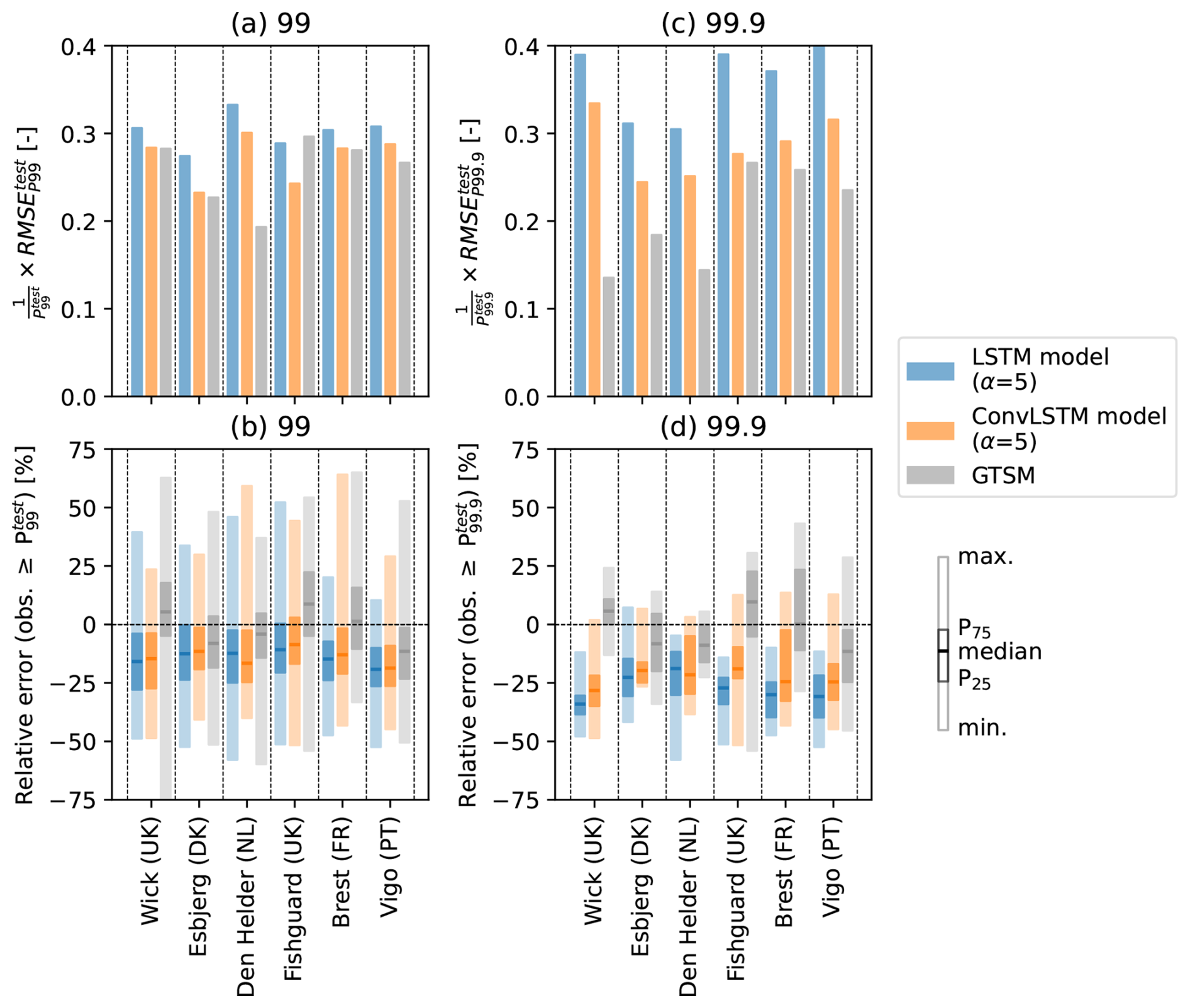
Figure 5(a) relative to , and (b) box plots of the distribution of the relative errors of the predictions of storm surges in the test split exceeding , at Wick (UK), Esbjerg (DK), Den Helder (NL), Fishguard (UK), Brest (FR), and Vigo (PT). (c) and (d) show the same, but using as a threshold for evaluating the prediction of observed extremes. Blue and orange colors are used to denote these metrics and distributions for the LSTM- and ConvLSTM models selected in Sect. 3.2 for α=5, respectively, and grey colors for the hydrodynamic model GTSM.
The predictions from which the error distributions in Fig. 5b were derived are shown in Fig. D4. Because Fig. D4 shows that the underestimation of extreme storm surges by the neural networks is more pronounced higher up the tail of the distributions of observed storm surges, we also computed the RMSE of predictions of exceedances of a higher threshold, namely (Fig. 5c). Whereas the of the ConvLSTM models and GTSM are comparable, the of GTSM is lower than that of the ConvLSTM models at all locations (average difference of 0.08 in the relative to ). Comparing the error distributions in Figs. 5b and d, we indeed find that the underestimation of extremes by the ConvLSTM models is more severe when using as a threshold. This contributes to a larger error compared to that of GTSM, which has predictions errors centered closer to 0 (Fig. 5d). Nevertheless, the improvement by the ConvLSTM models relative to the LSTM models is still significant. Although these results are sensitive because the is based on only a small number of extremes (see Table B1), they suggest that the performance of the neural networks falls off in comparison to GTSM when considering extremes above very high percentiles.
We found that training LSTM models with the density-based weighting devised by Steininger et al. (2021) improves both the error and timing of predicting extreme storm surge at 9 diverse tide-gauge locations in Europe. This suggests that existing data-driven storm-surge models used for similar applications (e.g. Bruneau et al., 2020; Tiggeloven et al., 2021; Harter et al., 2024; Tadesse et al., 2020) could also be improved by addressing the underrepresentation of extremes in the training data in this way. How much additional weight more extreme events should be given through the hyperparameter α depends on the location and the evaluation metrics to optimize (see Sects. 3.1 and 3.3), and therefore needs to be tuned in relation to the problem context. For instance, a higher α value may be better for applications in which recall is more important than precision (see Fig. D2).
The optimal α value for reweighting the loss function value varies by location likely because the distribution of the training data also varies by location. To apply the DenseLoss method to a larger number of locations in the future, the location-dependent tuning of α could be automated (e.g. Feurer and Hutter, 2019) or informed by the distributional features of the training data, such as target skewness and tail heaviness. More practically, α could be tuned for a limited number of clusters of locations with similar characteristics and distributions (e.g. Calafat and Marcos, 2020; Morim et al., 2025), either by training cluster-specific models or by training a single model incorporating cluster-specific attributes and weights (e.g. Kratzert et al., 2019). Our results suggest that even for a diverse set of locations, a common value for α>0 can be found that improves the performance of the data-driven models at predicting extremes at all locations, even though it may not lead to the most optimal performance at every location individually.
Additionally, we found that at most locations, using a ConvLSTM- instead of an LSTM model improves the predictions of the extreme storm surges. This conflicts with the results of Tiggeloven et al. (2021), who found that ConvLSTM models generally do not outperform LSTM models in Europe, nor globally. Most likely, the reason is that Tiggeloven et al. (2021) used atmospheric predictors in a region of 1.25 by 1.25° instead of 5 by 5° around each tide-gauge location as a default. Given that extratropical cyclones occur at scales of hundreds of kilometers (Catto, 2016), more meaningful spatiotemporal features can likely be extracted from the predictor data when using a larger region. This is supported by our sensitivity tests at Esbjerg (see Appendix A), which indicate that the LSTM- and ConvLSTM models indeed perform more similarly when trained with predictor data in a smaller region, as well as by sensitivity tests of Tiggeloven et al. (2021) with larger predictor regions.
Especially the ConvLSTM models perform relatively well at predicting extreme storm surges exceeding the 99th percentile, and their performance approximates that of the high-resolution, hydrodynamic model GTSM at the majority of locations (see Figs. 3 and 5). This is promising, especially since GTSM was forced with ERA5 data at a higher frequency than the neural networks (see Sect. 2.1) and we did not tune hyperparameters other than the learning rate, the dropout rate, and α (see Sect. 2.3). Furthermore, depending on the application, a somewhat lower performance may be acceptable in exchange for the much lower computational cost of applying the neural networks once trained. Follow-up research could therefore investigate the application of our neural networks to climate model simulations. This will introduce additional complexity because simulated distributions of predictor variables may differ from observed ones used for training due to climate-model biases and potential non-stationarity due to future changes (Lockwood et al., 2022). In this context, hydrodynamic model simulations forced with the same climate model simulations (e.g. Muis et al., 2023) could serve as a valuable benchmark.
At one location (Alicante), both the neural networks and GTSM performed reasonably in the validation split but poorly in the test split (Sect. 3.3), suggesting that the observed extremes in the test split can be explained by atmospherically-driven surges less well (see Sect. 3.3). Previous studies have also reported a lower performance of both data-driven and hydrodynamic models in southern Europe (e.g. Muis et al., 2020, 2023; Tadesse et al., 2020; Bruneau et al., 2020; Tiggeloven et al., 2021). A complicating factor is that storm surges in this area are small and the effect of other processes such as ocean dynamic sea-level variability, freshwater forcing and waves are therefore relatively more important. Adding other predictors like temperature, precipitation, river discharge or waves, may help to represent these processes (Tadesse et al., 2020; Tiggeloven et al., 2021; Bruneau et al., 2020; Harter et al., 2024), but not all of these predictors are directly available from climate models.
We trained and evaluated the models using tide-gauge observations outside the harbor of Alicante because they are more complete, but tide-gauge observations inside the harbor are also available (Marcos et al., 2021; Haigh et al., 2021). Upon comparison, we found that the two tide-gauge records have large differences in their extremes especially in the test split, and that both the predictions of the neural networks and the simulations of GTSM agree better with the observations inside the harbor. This signals the importance of waves, which affect the tide gauge inside the harbor less and are not (well) captured by the models. Another reason for the difference could be observational errors. To train the neural networks with less noisy data, hydrodynamic simulations could be used as the predictand instead of tide-gauge observations. The downside, however, is that the neural networks will then inherit the biases of the hydrodynamic model and will not learn any indirect dependencies of observed extreme water levels on surface winds and sea-level pressure.
At two locations (Stavanger and Immingham), GTSM performed significantly better than the neural networks (Fig. 3). Given that the models are forced by the same atmospheric variables, this suggests that the neural networks at especially Stavanger and Immingham may be improved by further optimizing the neural networks. Like α, the optimal hyperparameters of neural networks appear to be location-dependent (Tiggeloven et al., 2021). Therefore, more extensive hyperparameter tuning than we did here may help to reduce both the performance differences between locations and between the neural networks and GTSM, including at predicting the highest extremes. This could also involve optimizing the variables, domain size and look-back window of the predictor data used at each tide-gauge location (see Appendix A).
Similarly to Harter et al. (2024), we find that the neural networks predominantly underestimate exceedances of very high percentiles (e.g. the 99.9th). While this indicates that by density-based weighting, the neural networks are not overcompensating by forcing good scores on only a few high-weighted outliers, the models do perform worse than GTSM in this regard (Sect. 3.4). Agulles et al. (2024) found that by using daily instead of hourly atmospheric forcing, their hydrodynamic model underestimated the 99.9th percentile of non-tidal residuals by approximately 30 %–50 %. While the underestimation with 3-hourly instead of hourly forcing would likely be less severe, their results suggest that the difference in the temporal frequency of the forcing of the neural networks and GTSM explains the differences in their tail behaviour at least partially. Future work could investigate this further by running a hydrodynamic model with 3-hourly forcing.
Another reason for the predominant underestimation of exceedances of the 99.9th percentile could be the limited ability of the neural networks to extrapolate to the highest extremes, despite our use of DenseLoss. Smaller errors may be obtained by increasing the density-based weights beyond the values that we tested, but likely at the cost of reduced precision (Sect. 3.1). We therefore suggest several other avenues that follow-up research could explore to reduce the underestimation. First, to reduce the degree of extrapolation required, it could be helpful to train the models with more data. This could be obtained from the backward extension of ERA5 to 1950 (Bell et al., 2021), depending on the length of the tide-gauge records. In the same spirit, the added value of complementing density-based weighting with synthetic oversampling of the extremes (e.g. Branco et al., 2017), and transfer learning across both different storm-surge datasets and different locations (e.g. Xu et al., 2023), would be useful to explore.
Second, while we chose to use LSTMs and ConvLSTMs (see Sect. 2.2), follow-up research could investigate whether the predictions of the extreme storm surges can be improved with other, emerging model architectures. For instance, graph neural networks, hierarchical deep neural networks and gaussian process models have been found beneficial for short-term forecasting (Kyprioti et al., 2023; Jiang et al., 2024; Naeini et al., 2025), and may also be in our context. Graph neural networks in particular could help to predict storm surges at multiple related locations, capturing spatial dependencies by representing different locations as nodes of a graph. Furthermore, path signatures, which encode features from time series through tensors of iterated path integrals, have shown promise as feature maps in machine learning tasks concerning irregular time series and the detections of extreme events (Riess et al., 2024; Lyons and McLeod, 2024; Akyildirim et al., 2022; Arrubarrena et al., 2024). Additionally, implementing self-attention mechanisms could help the neural networks to dynamically focus on those features of the input data that are most relevant to the extremes (Ian et al., 2023; Wang et al., 2022). Finally, accuracy may be improved by incorporating the shallow-water equations into the models, using so-called physics-informed neural networks (e.g. Zhu et al., 2025; Donnelly et al., 2024).
We conclude that through density-based weighting, the cost-sensitive learning approach DenseLoss (Steininger et al., 2021) improves the performance of neural networks at predicting extreme storm surges at all 9 selected tide-gauge locations in Europe. Furthermore, at most locations, exploiting spatiotemporal dependencies using a ConvLSTM- instead of LSTM layer also improves the performance, if a sufficiently large region of atmospheric predictor data is used. At 7 out of the 9 tide-gauge locations that we used, the performance of especially the ConvLSTM models closely approximates that of the state-of-the-art, hydrodynamic Global Tide and Surge Model (GTSM), based on performance metrics evaluated using the 99th percentile as a threshold for extremes. This is a positive sign for the potential application of neural networks to climate model simulations to project changes in extreme storm surges, especially since we trained the neural networks with 3-hourly data (the highest frequency at which climate model simulations are typically provided) whereas GTSM was forced with hourly data. However, the neural networks still predominantly underestimate the highest extreme storm surges (those exceeding the 99.9th percentile). Follow-up research may improve this by further optimizing the neural networks and the data used to train them.
To test the sensitivity of the performance of the neural networks to the configuration of the predictor data, we performed several additional tests at the tide gauge in Esbjerg (Denmark). For these tests, we separately varied the predictor variables, the domain size and the length of the look-back window for a combination of LSTM and ConvLSTM models (see Fig. A1). The models were trained 10 times each to account for random variance, using a fixed dropout and learning rate (0.1 and 5e−5, respectively), and α values of 0, 1, 3, and 5. Figure A1 shows the average error metrics (relative RMSEP99 and F1P99) for each sensitivity test, in both the validation and test splits.
Based on these tests, we find that using the zonal and meridional wind components in addition to sea-level pressure clearly improves the performance of the LSTM models, especially with regard to their generalization to the test split (see Fig. A1, top row). Additionally using the absolute wind speed does not substantially affect model performance. Therefore, the absolute wind speed could potentially be left out as a predictor variable in the future to increase training efficiency.
Second, the LSTM models trained with a predictor region of 3 by 3 or 5 by 5° tend to outperform LSTM models trained with a domain size of 1 by 1° (see Fig. A1, second row), but not by much. Comparatively, the ConvLSTM models benefit from a larger domain size more (see Fig. A1, third row). As a consequence, the ConvLSTM models outperform the LSTM models when using a predictor region of 3 by 3 and 5 by 5°, but not (clearly) when using a predictor region of only 1 by 1°.
Third, we find that using a look-back window for the predictor data is clearly better for the performance of the LSTM models than using no look-back window (see Fig. A1, bottom row). A look-back window of 24 h, which we use in the main manuscript, seems to be approximately optimal. Namely, increasing the look-back window from 24 to 36 h did not further improve the performance of the models.
Finally, while the results in Fig. A1 provide useful insights into the sensitivity of the neural networks to the predictor variables, region size and look-back window, we varied these parameters separately and did not test different combinations. Additionally, the optimal configuration of the predictor data may vary by location. Follow-up research could further investigate fine-tuning the predictor data at specific locations.
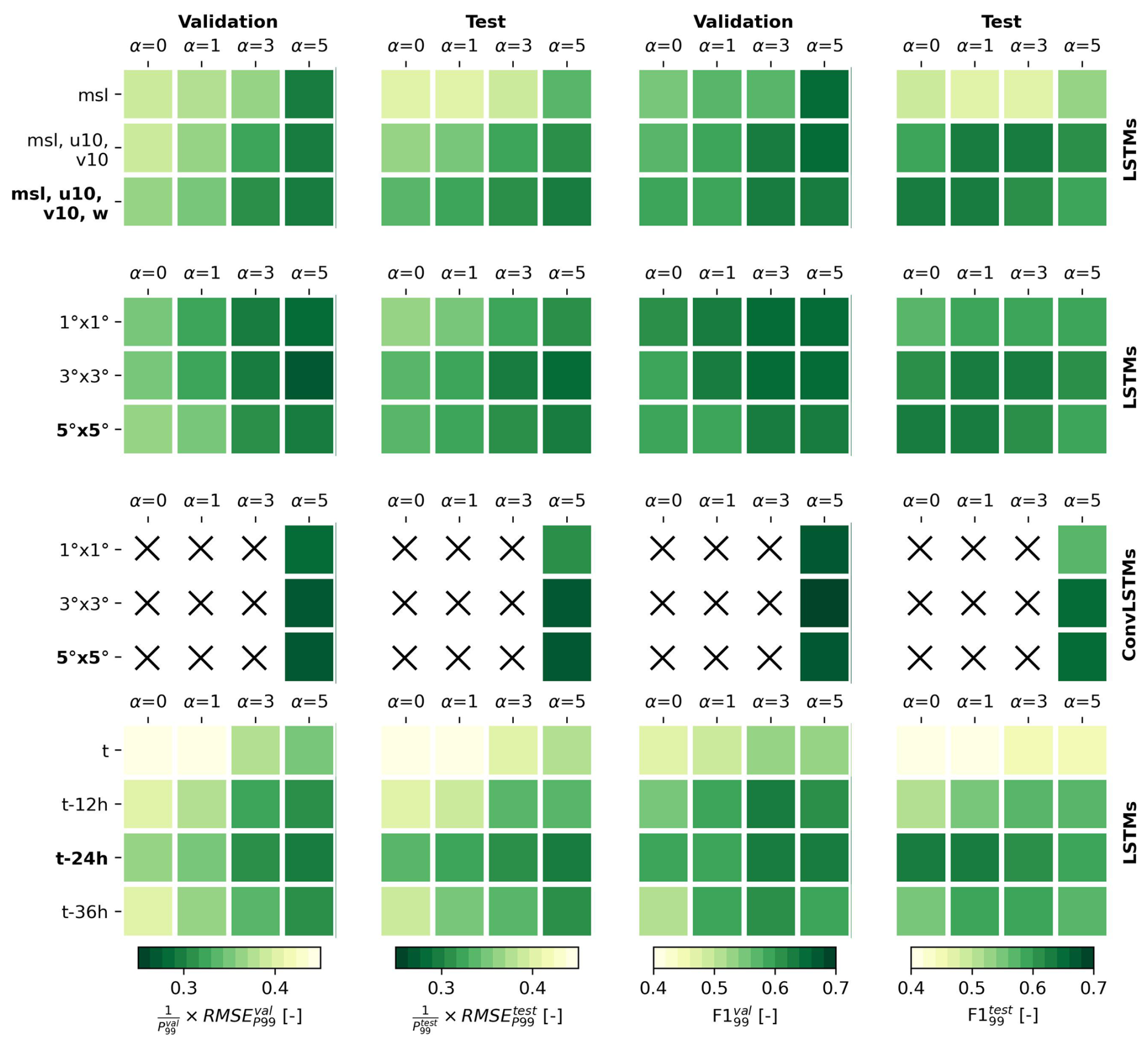
Figure A1Sensitivity of the average RMSEP99 relative to P99 [–] and F1P99 [–] of the LSTM and ConvLSTM models at Esbjerg (DK) to the predictor variables (mean sea-level pressure msl, zonal and meridional wind u10 and v10, and absolute wind speed w10), domain size of the predictor data (1 by 1, 3 by 3 or 5 by 5°), and the length of the look-back window (0, 12, 24 or 36 h), for different values of α. The error metrics are shown for both the validation (1st and 3rd columns) and the test splits (2nd and 4th columns). The bold text on the left of the figure indicates the default settings used for the results in the main manuscript.
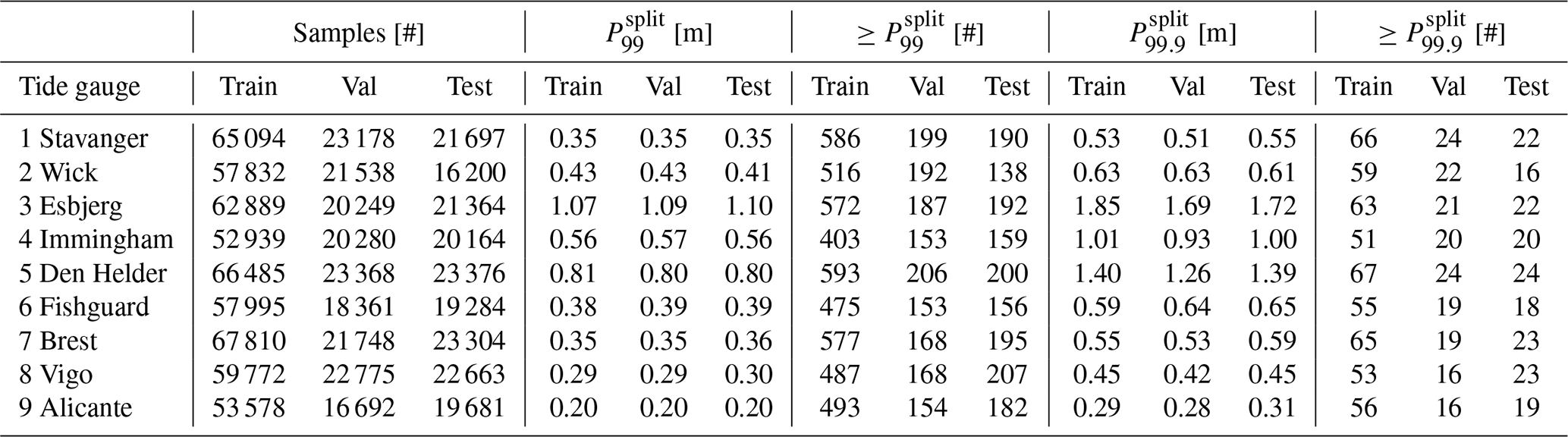
Table B1Number of samples, the magnitude of the 99th and 99.9th percentiles (P99 and P99.9) [m], and the number of filtered (see Sect. 2.4) extremes exceeding P99 and P99.9, per split and per tide gauge.
The LSTM model consists of an LSTM layer followed by 3 densely connected layers (Fig. C1). For the LSTM layer, we specified 32 units and otherwise used the default TensorFlow options. The first two densely connected layers have 32 neurons, the commonly used rectified linear unit (ReLu) activation and L2 regularization (l2=0.02), and are followed by a dropout layer with a dropout rate that we lightly tuned (see Sect. 2.3). Regularization and dropout help to avoid overfitting the model to the training data. The last dense layer has 1 neuron and a linear activation to predict a single storm surge at each time step. The ConvLSTM model consists of a ConvLSTM instead of regular LSTM layer, with 32 kernels of 3 by 3 grid cells, even padding and also a ReLu activation. The ConvLSTM layer is followed by batch normalization and a max-pooling layer that reduces the spatial dimensions of identified features. The remainder of the ConvLSTM model is the same as in the LSTM model.
For each prediction, predictors at time steps up to 24 h prior were used (see Sect. 2.1), resulting in a total of nine 3-hourly time steps per prediction. The predictor data at each of the 20 by 20 grid cells and for each of the 4 predictor variables shown in Fig. 1 were stacked for the LSTM model, resulting in input data with the shape (). Here, nobs refers to the number of observations. For the ConvLSTM model, the grid cells were not stacked and the 4 predictor variables were inputted as channels. The input to the ConvLSTM model therefore has the shape ().
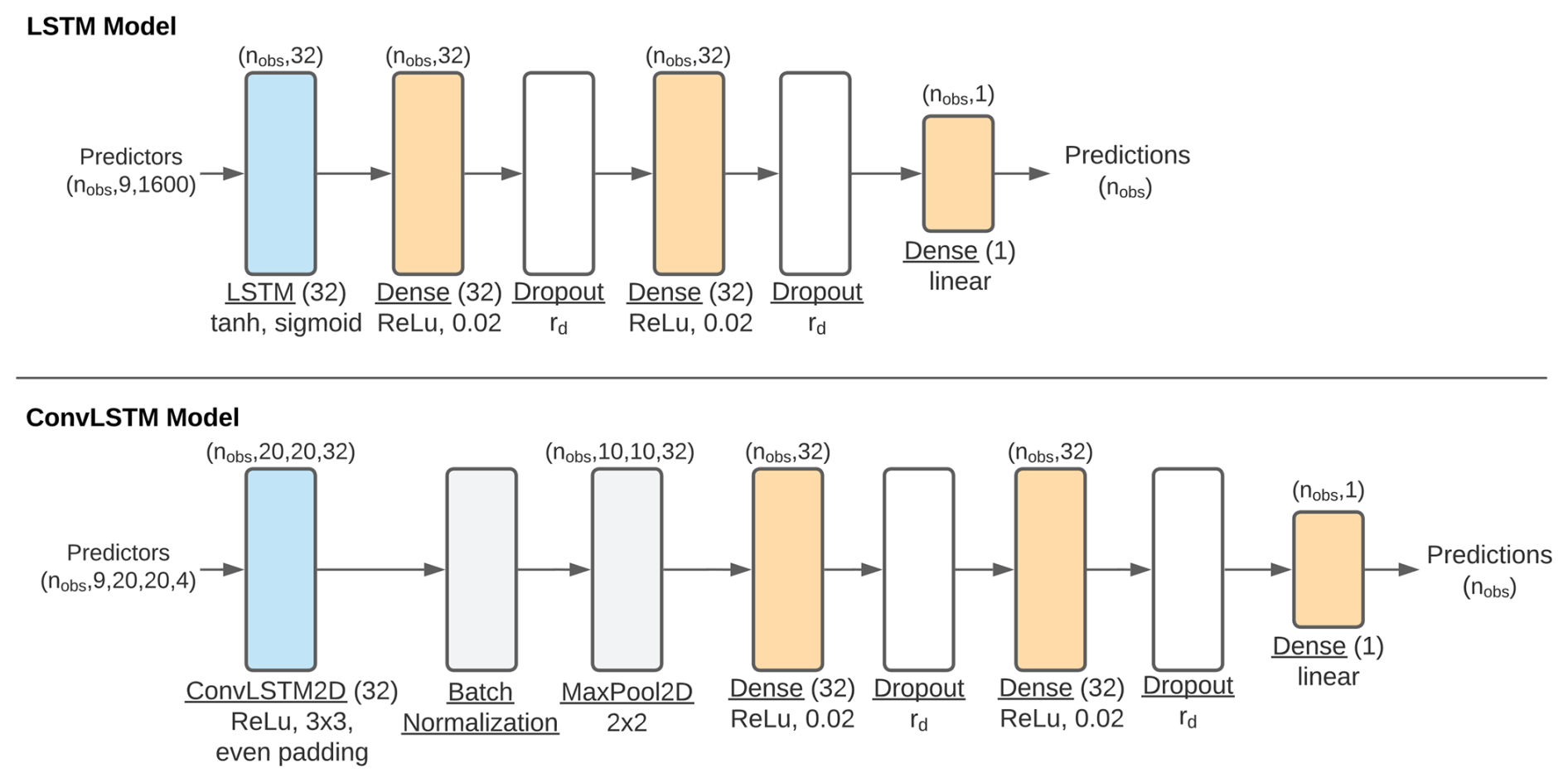
Figure C1Flowchart of the architectures of the LSTM- and ConvLSTM models used. The blue rectangles represent the LSTM and ConvLSTM layers, the orange rectangles the densely connected layers, the white rectangles the dropout layers and the grey layers the batch normalization and max-pooling layers. The labels above the rectangles show how the shape of the data after passing through that layer. rd refers to the tunable dropout rate.
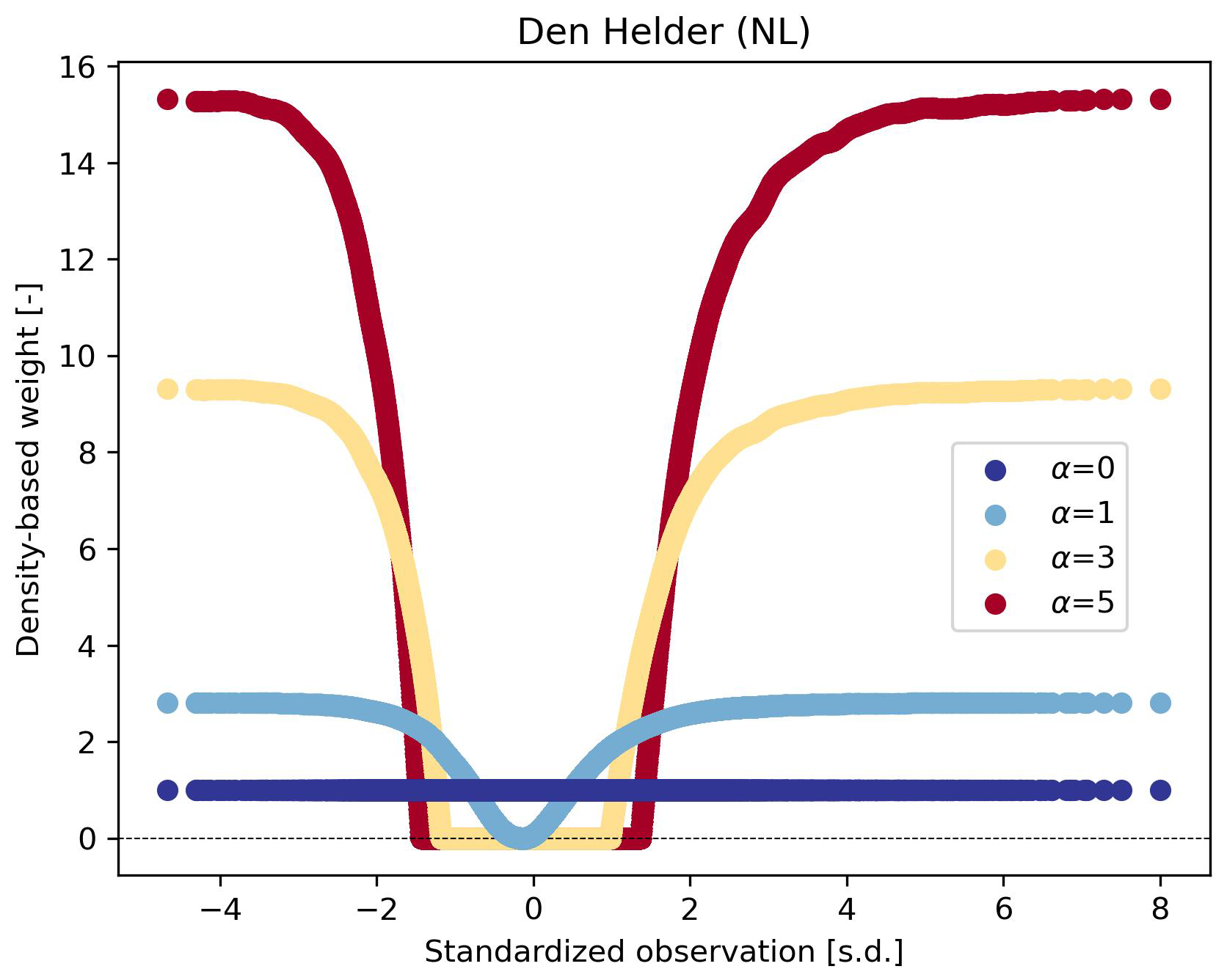
Figure D1Density-based weights [–] of standardized observations [standard deviation (s.d.)] at Den Helder (NL) for α values of 0, 1, 3, and 5. Weights lower than 1e−6 were clipped to 1e−6 (see Sect. 2.3).
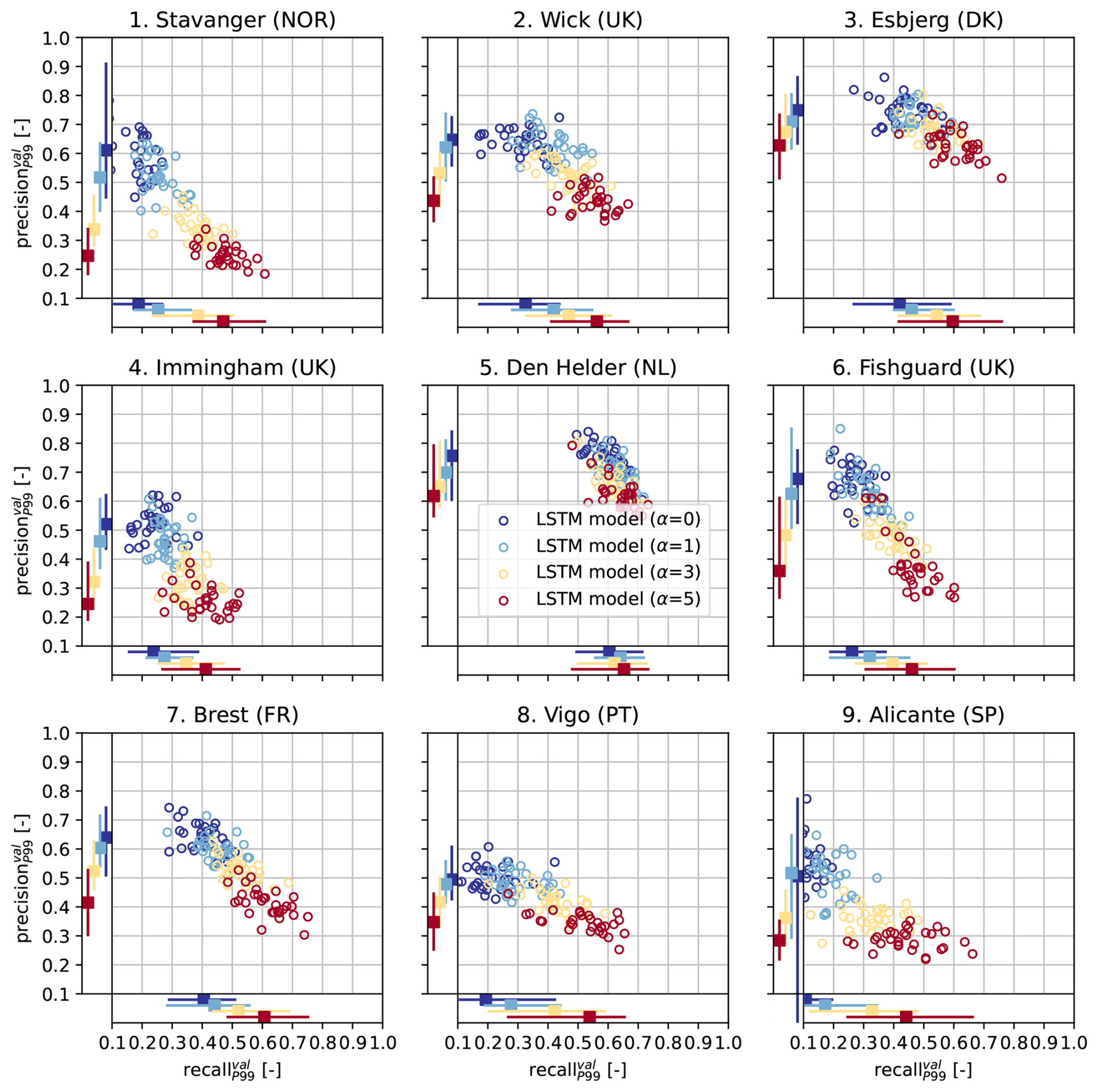
Figure D2Scatter plots of the [–] vs. the [–], for each tide-gauge location. Each circle denotes these error metrics for an individual LSTM model. The colors indicate the different values of α (0, 1, 3 or 5) used to train each LSTM model (30 LSTM models per α per location, as explained in Sect. 2.3). The bars on the bottom and left sides of each panel denote the minimum, median and maximum and of the LSTM models for each α, respectively.
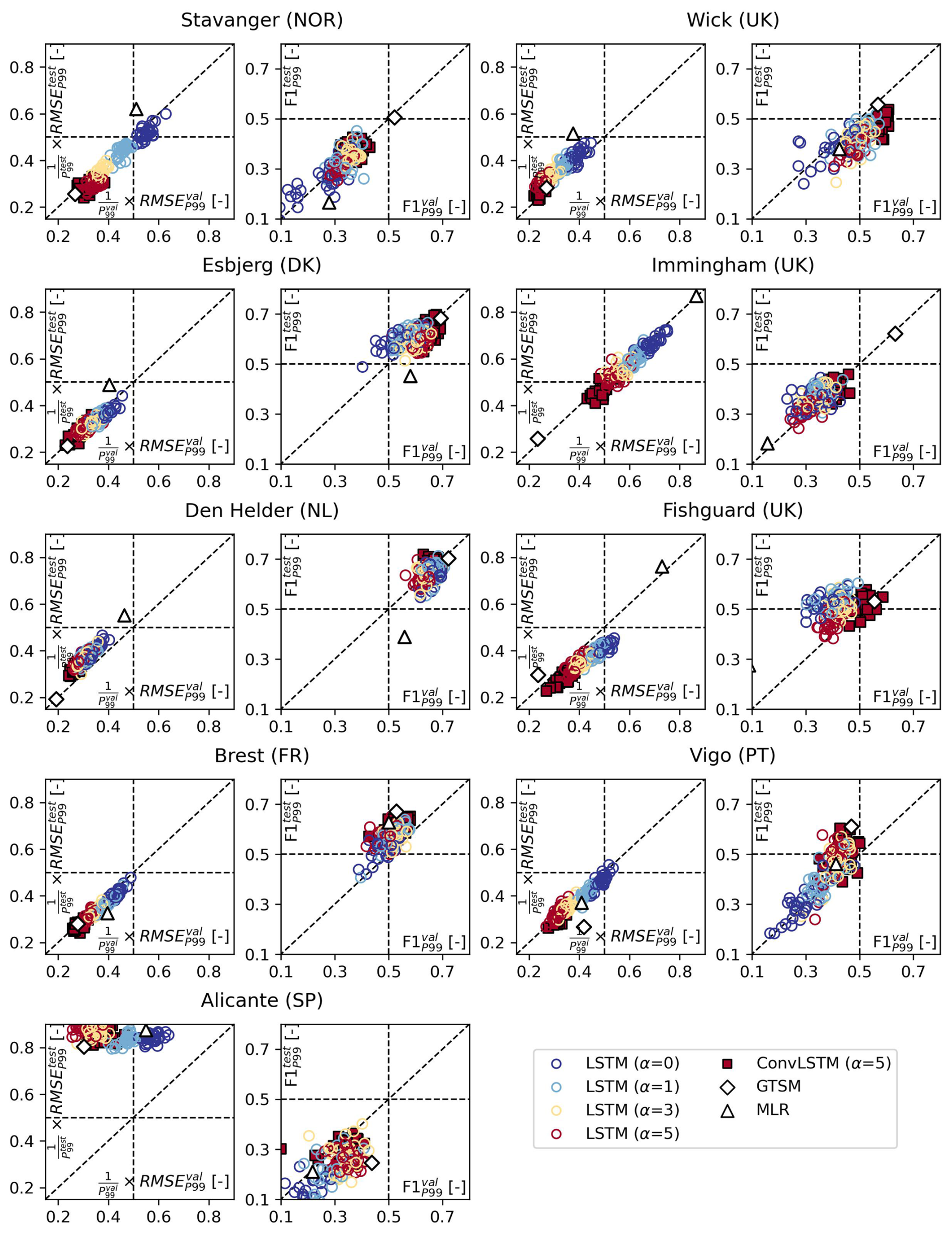
Figure D3Scatter plots of RMSEP99 relative to P99 [–] and F1P99 [–] in the validation vs. in the test split, displayed per tide gauge. The colored circles represent the LSTM models for different values of α, the black-edged red squares the ConvLSTM models for α=5, and the white triangles and diamonds the MLR model of Tadesse et al. (2020), and GTSM (Muis et al., 2020), respectively. The diagonal line in each panel indicates equal error metrics in the validation and test splits.
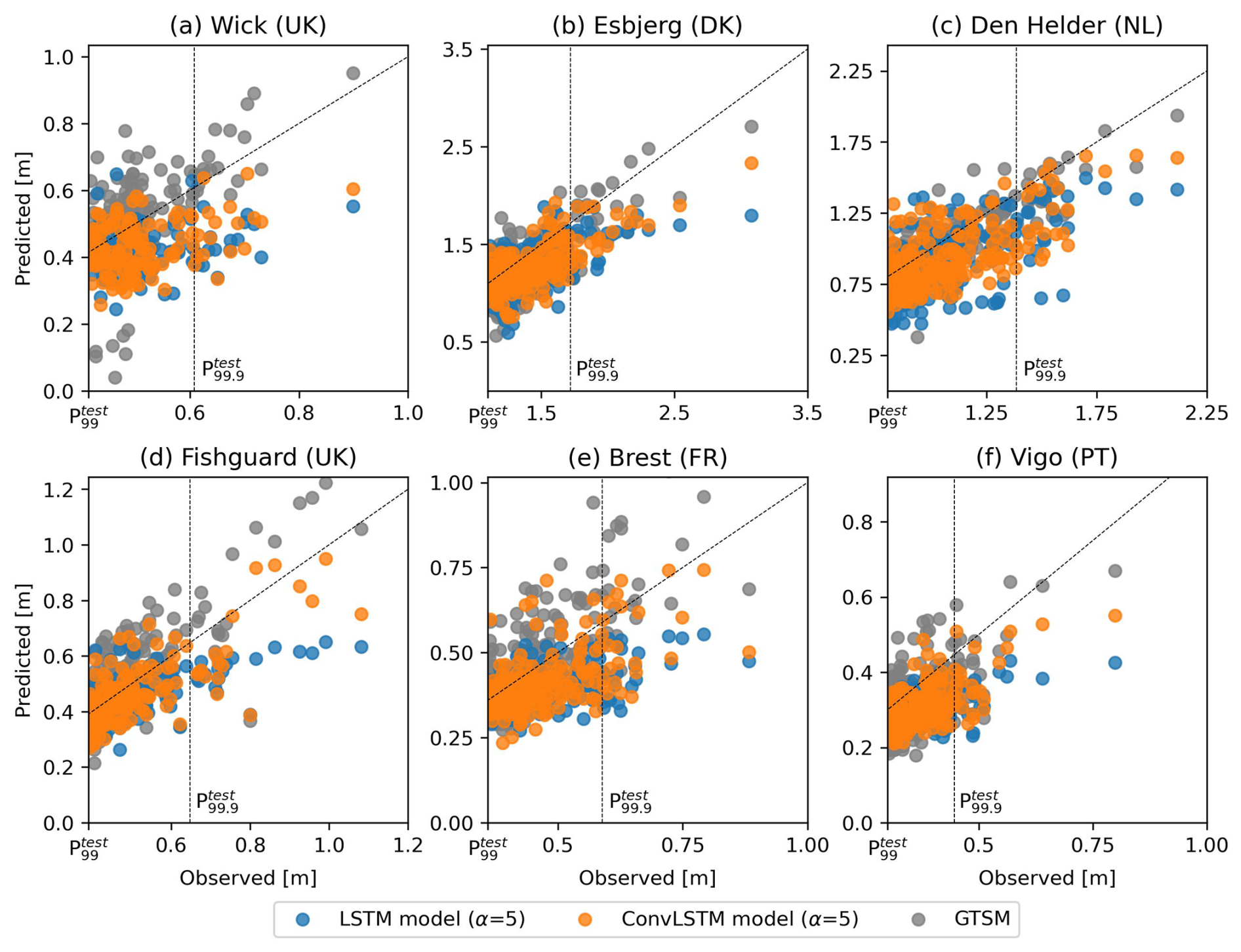
Figure D4Scatter plots of predictions vs. observed extremes () in the test split [m] at (a) Wick (UK), (b) Esbjerg (DK), (c) Den Helder (NL), (d) Fishguard (UK), (e) Brest (FR) and (f) Vigo (PT). The blue and orange circles represent the predictions of the LSTM- and ConvLSTM models selected in Sect. 3.2 for α=5, respectively. The grey circles represent the storm surges simulated with the hydrodynamic model GTSM. The vertical dashed line indicates the observed 99.9th percentile in the test split (), and the diagonal 1:1 line denotes equal predictions and observations.
The software that we developed to train and evaluate the models is publicly available on GitHub (https://github.com/Timh37/surgeNN, last access: 30 September 2025) and archived on Zenodo (https://doi.org/10.5281/zenodo.17235580, Hermans, 2025b).
Both the input and output data underlying the results in this manuscript are publicly available on Zenodo (https://doi.org/10.5281/zenodo.17242455, Hermans, 2025a).
THJH and CBH conceptualized the study. THJH developed the methodology, and analyzed and visualized the results, with support of the other authors. THJH wrote the manuscript. All authors contributed to reviewing and editing the manuscript.
The contact author has declared that none of the authors has any competing interests.
Publisher's note: Copernicus Publications remains neutral with regard to jurisdictional claims made in the text, published maps, institutional affiliations, or any other geographical representation in this paper. While Copernicus Publications makes every effort to include appropriate place names, the final responsibility lies with the authors. Views expressed in the text are those of the authors and do not necessarily reflect the views of the publisher.
Tim H. J. Hermans was supported by PROTECT. This project has received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement no. 869304, PROTECT contribution number [166]. Tim H. J. Hermans also received funding from the NPP programme of NWO. Julius J. M. Busecke acknowledges funding from the National Science Foundation (Award 2019625). Timothy Tiggeloven received support from the MYRIAD-EU project, which received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement no. 101003276. Anaïs Couasnon received support from the COMPASS project, which received funding from the European Union's Horizon 2020 research and innovation programme under grant agreement no. 101135481. We acknowledge the computing and storage resources provided by the “NSF Science and Technology Center (STC) Learning the Earth with Artificial intelligence and Physics (LEAP)” (award no. 2019625).
This research has been supported by the Horizon 2020 (grant nos. 86930, 10100327, and 101135481) and the National Science Foundation (grant no. 2019625).
This paper was edited by Rachid Omira and reviewed by two anonymous referees.
Agulles, M., Marcos, M., Amores, A., and Toomey, T.: Storm surge modelling along European coastlines: the effect of the spatio-temporal resolution of the atmospheric forcing, Ocean Model., 192, https://doi.org/10.1016/j.ocemod.2024.102432, 2024. a, b
Akyildirim, E., Gambara, M., Teichmann, J., and Zhou, S.: Applications of Signature Methods to Market Anomaly Detection, arXiv [preprint], https://doi.org/10.48550/arXiv.2201.02441, 2022. a
Arrubarrena, P., Lemercier, M., Nikolic, B., Lyons, T., and Cass, T.: Novelty Detection on Radio Astronomy Data using Signatures, arXiv [preprint], https://doi.org/10.48550/arXiv.2402.14892, 2024. a
Ayyad, M., Hajj, M. R., and Marsooli, R.: Machine learning-based assessment of storm surge in the New York metropolitan area, Sci. Rep.-UK, 12, https://doi.org/10.1038/s41598-022-23627-6, 2022. a
Bell, B., Hersbach, H., Simmons, A., Berrisford, P., Dahlgren, P., Horányi, A., Muñoz-Sabater, J., Nicolas, J., Radu, R., Schepers, D., Soci, C., Villaume, S., Bidlot, J. R., Haimberger, L., Woollen, J., Buontempo, C., and Thépaut, J. N.: The ERA5 global reanalysis: preliminary extension to 1950, Q. J. Roy. Meteor. Soc., 147, 4186–4227, https://doi.org/10.1002/qj.4174, 2021. a
Branco, P., Ribeiro, R. P., Torgo, L., Krawczyk, B., and Moniz, N.: SMOGN: a Pre-processing Approach for Imbalanced Regression, Tech. rep., Proceedings of Machine Learning Research, http://proceedings.mlr.press/v74/branco17a/branco17a.pdf (last access: 1 September 2025), 2017. a, b
Bruneau, N., Polton, J., Williams, J., and Holt, J.: Estimation of global coastal sea level extremes using neural networks, Environ. Res. Lett., 15, https://doi.org/10.1088/1748-9326/ab89d6, 2020. a, b, c, d, e, f, g, h
Calafat, F. M. and Marcos, M.: Probabilistic reanalysis of storm surge extremes in Europe, Proc. Natl. Acad. Sci. U.S.A., 117, 1877–1883, https://doi.org/10.1073/pnas.1913049117, 2020. a
Catto, J. L.: Extratropical cyclone classification and its use in climate studies, Rev. Geophys., 54, 486–520, https://doi.org/10.1002/2016RG000519, 2016. a
Cid, A., Camus, P., Castanedo, S., Méndez, F. J., and Medina, R.: Global reconstructed daily surge levels from the 20th Century Reanalysis (1871–2010), Global Planet. Change, 148, 9–21, https://doi.org/10.1016/j.gloplacha.2016.11.006, 2017. a
Cid, A., Wahl, T., Chambers, D. P., and Muis, S.: Storm surge reconstruction and return water level estimation in Southeast Asia for the 20th century, J. Geophys. Res.-Oceans, 123, 437–451, https://doi.org/10.1002/2017JC013143, 2018. a, b
Donnelly, J., Daneshkhah, A., and Abolfathi, S.: Physics-informed neural networks as surrogate models of hydrodynamic simulators, Sci. Total Environ., 912, https://doi.org/10.1016/j.scitotenv.2023.168814, 2024. a
Eyring, V., Bony, S., Meehl, G. A., Senior, C. A., Stevens, B., Stouffer, R. J., and Taylor, K. E.: Overview of the Coupled Model Intercomparison Project Phase 6 (CMIP6) experimental design and organization, Geosci. Model Dev., 9, 1937–1958, https://doi.org/10.5194/gmd-9-1937-2016, 2016. a
Feurer, M. and Hutter, F.: Hyperparameter Optimization, Springer, https://doi.org/10.1007/978-3-030-05318-5_1, 3–33, 2019. a
Haarsma, R. J., Roberts, M. J., Vidale, P. L., Senior, C. A., Bellucci, A., Bao, Q., Chang, P., Corti, S., Fučkar, N. S., Guemas, V., von Hardenberg, J., Hazeleger, W., Kodama, C., Koenigk, T., Leung, L. R., Lu, J., Luo, J.-J., Mao, J., Mizielinski, M. S., Mizuta, R., Nobre, P., Satoh, M., Scoccimarro, E., Semmler, T., Small, J., and von Storch, J.-S.: High Resolution Model Intercomparison Project (HighResMIP v1.0) for CMIP6, Geosci. Model Dev., 9, 4185–4208, https://doi.org/10.5194/gmd-9-4185-2016, 2016. a
Haigh, I. D., Marcos, M., Talke, S. A., Woodworth, P. L., Hunter, J. R., Hague, B. S., Arns, A., Bradshaw, E., and Thompson, P.: GESLA Version 3: A major update to the global higher-frequency sea-level dataset, Geoscience Data Journal, 10, 293–314, https://doi.org/10.1002/gdj3.174, 2023. a, b
Harter, L., Pineau-Guillou, L., and Chapron, B.: Underestimation of extremes in sea level surge reconstruction, Sci. Rep.-UK, 14, https://doi.org/10.1038/s41598-024-65718-6, 2024. a, b, c, d, e, f, g, h, i
Hermans, T.: Data underlying “Computing Extreme Storm Surges in Europe Using Neural Networks” Zenodo [data set], https://doi.org/10.5281/zenodo.17242455, 2025a. a
Hermans, T.: Timh37/surgeNN: Version for NHESS paper (v1.1), Zenodo [code], https://doi.org/10.5281/zenodo.17235580, 2025b. a, b
Hermans, T. H. J., Malagón-Santos, V., Katsman, C. A., Jane, R. A., Rasmussen, D. J., Haasnoot, M., Garner, G. G., Kopp, R. E., Oppenheimer, M., and Slangen, A. B. A.: The timing of decreasing coastal flood protection due to sea-level rise, Nat. Clim. Chang., 13, 359–366, https://doi.org/10.1038/s41558-023-01616-5, 2023. a
Hermans, T. H., Busecke, J. J., Wahl, T., Malagón-Santos, V., Tadesse, M. G., Jane, R. A., and van de Wal, R. S.: Projecting changes in the drivers of compound flooding in Europe using CMIP6 models, Earths Future, 12, https://doi.org/10.1029/2023EF004188, 2024. a
Hersbach, H., Bell, B., Berrisford, P., Hirahara, S., Horányi, A., Muñoz-Sabater, J., Nicolas, J., Peubey, C., Radu, R., Schepers, D., Simmons, A., Soci, C., Abdalla, S., Abellan, X., Balsamo, G., Bechtold, P., Biavati, G., Bidlot, J., Bonavita, M., Chiara, G. D., Dahlgren, P., Dee, D., Diamantakis, M., Dragani, R., Flemming, J., Forbes, R., Fuentes, M., Geer, A., Haimberger, L., Healy, S., Hogan, R. J., Hólm, E., Janisková, M., Keeley, S., Laloyaux, P., Lopez, P., Lupu, C., Radnoti, G., de Rosnay, P., Rozum, I., Vamborg, F., Villaume, S., and Thépaut, J. N.: The ERA5 global reanalysis, Q. J. Roy. Meteor. Soc., 146, 1999–2049, https://doi.org/10.1002/qj.3803, 2020. a, b
Hochreiter, S. and Schmidhuber, J.: Long short-term memory, Neural Comput., 9, 1735–1780, https://doi.org/10.1162/neco.1997.9.8.1735, 1997. a
Ian, V. K., Tse, R., Tang, S. K., and Pau, G.: Bridging the gap: enhancing storm surge prediction and decision support with bidirectional attention-based LSTM, Atmosphere-Basel, 14, https://doi.org/10.3390/atmos14071082, 2023. a, b
Jevrejeva, S., Williams, J., Vousdoukas, M. I., and Jackson, L. P.: Future sea level rise dominates changes in worst case extreme sea levels along the global coastline by 2100, Environ. Res. Lett., 18, https://doi.org/10.1088/1748-9326/acb504, 2023. a
Jiang, W., Zhang, J., Li, Y., Zhang, D., Hu, G., Gao, H., and Duan, Z.: Advancing storm surge forecasting from scarce observation data: a causal-inference based spatio-temporal graph neural network approach, Coast. Eng., 190, https://doi.org/10.1016/j.coastaleng.2024.104512, 2024. a
Kingma, D. P. and Ba, J.: Adam: A Method for Stochastic Optimization, in: 3rd International Conference for Learning Representations, arXiv [preprint], https://doi.org/10.48550/arXiv.1412.6980, 2017. a
Kratzert, F., Klotz, D., Shalev, G., Klambauer, G., Hochreiter, S., and Nearing, G.: Towards learning universal, regional, and local hydrological behaviors via machine learning applied to large-sample datasets, Hydrol. Earth Syst. Sci., 23, 5089–5110, https://doi.org/10.5194/hess-23-5089-2019, 2019. a
Krawczyk, B.: Learning from imbalanced data: open challenges and future directions, Prog. Artif. Intel., 5, 221–232, https://doi.org/10.1007/s13748-016-0094-0, 2016. a
Kyprioti, A. P., Irwin, C., Taflanidis, A. A., Nadal-Caraballo, N. C., Yawn, M. C., and Aucoin, L. A.: Spatio-temporal storm surge emulation using Gaussian process techniques, Coast. Eng., 180, https://doi.org/10.1016/j.coastaleng.2022.104231, 2023. a
Lerch, S., Thorarinsdottir, T. L., Ravazzolo, F., and Gneiting, T.: Forecaster's dilemma: extreme events and forecast evaluation, Stat. Sci., 32, 106–127, https://doi.org/10.1214/16-STS588, 2017. a
Lockwood, J. W., Lin, N., Oppenheimer, M., and Lai, C. Y.: Using neural networks to predict hurricane storm surge and to assess the sensitivity of surge to storm characteristics, J. Geophys. Res.-Atmos., 127, https://doi.org/10.1029/2022JD037617, 2022. a, b
Lyons, T. and McLeod, A. D.: Signature Methods in Machine Learning, arXiv [preprint], https://doi.org/10.48550/arXiv.2206.14674, 2024. a
Marcos, M., Puyol, B., Amores, A., Gómez, B. P., Ángeles Fraile, M., and Talke, S. A.: Historical tide gauge sea-level observations in Alicante and Santander (Spain) since the 19th century, Geosci. Data J., 8, 144–153, https://doi.org/10.1002/gdj3.112, 2021. a
Morim, J., Wahl, T., Rasmussen, D. J., Calafat, F. M., Vitousek, S., Dangendorf, S., Kopp, R. E., and Oppenheimer, M.: Observations reveal changing coastal storm extremes around the United States, Nat. Clim. Change, 15, 538–545, https://doi.org/10.1038/s41558-025-02315-z, 2025. a
Muis, S., Apecechea, M. I., Dullaart, J., de Lima Rego, J., Madsen, K. S., Su, J., Yan, K., and Verlaan, M.: A high-resolution global dataset of extreme sea levels, tides, and storm surges, including future projections, Frontiers in Marine Science, 7, 263, https://doi.org/10.3389/fmars.2020.00263, 2020. a, b, c, d, e, f, g, h, i, j, k
Muis, S., Aerts, J. C., José, J. A., Dullaart, J. C., Duong, T. M., Erikson, L., Haarsma, R. J., Apecechea, M. I., Mengel, M., Bars, D. L., O'Neill, A., Ranasinghe, R., Roberts, M. J., Verlaan, M., Ward, P. J., and Yan, K.: Global projections of storm surges using high-resolution CMIP6 climate models, Earths Future, 11, https://doi.org/10.1029/2023EF003479, 2023. a, b, c, d, e, f, g, h, i
Naeini, S. and Snaiki, R.: A novel hybrid machine learning model for rapid assessment of wave and storm surge responses over an extended coastal region, Coast. Eng., 190, https://doi.org/10.1016/j.coastaleng.2024.104503, 2024. a
Naeini, S. S., Snaiki, R., and Wu, T.: Advancing spatio-temporal storm surge prediction with hierarchical deep neural networks, Nat. Hazards, 16317–16344, https://doi.org/10.1007/s11069-025-07428-4, 2025. a
Paprotny, D., Morales-Nápoles, O., and Jonkman, S. N.: HANZE: a pan-European database of exposure to natural hazards and damaging historical floods since 1870, Earth Syst. Sci. Data, 10, 565–581, https://doi.org/10.5194/essd-10-565-2018, 2018. a
Pawlowicz, R., Beardsley, B., and Lentz, S.: Classical tidal harmonic analysis including error estimates in MATLAB using T TIDE, Comput. Geosci., 28, 929–937, https://doi.org/10.1016/S0098-3004(02)00013-4, 2002. a
Piccioni, G., Dettmering, D., Bosch, W., and Seitz, F.: TICON: TIdal CONstants based on GESLA sea-level records from globally located tide gauges, Geosci. Data J., 6, 97–104, https://doi.org/10.1002/gdj3.72, 2019. a
Qin, Y., Su, C., Chu, D., Zhang, J., and Song, J.: A review of application of machine learning in storm surge problems, Journal of Marine Science and Engineering, 11, https://doi.org/10.3390/jmse11091729, 2023. a
Ramos-Valle, A. N., Curchitser, E. N., Bruyère, C. L., and McOwen, S.: Implementation of an artificial neural network for storm surge forecasting, J. Geophys. Res.-Atmos., 126, https://doi.org/10.1029/2020JD033266, 2021. a
Riess, H., Veveakis, M., and Zavlanos, M. M.: Path Signatures and Graph Neural Networks for Slow Earthquake Analysis: Better Together?, arXiv [preprint], https://doi.org/10.48550/arXiv.2402.03558, 2024. a
Shi, X., Chen, Z., Wang, H., Yeung, D.-Y., Wong, W.-K., Woo, W.-C., and Observatory, H. K.: Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting, in: NIPS Proceedings, arXiv [preprint], https://doi.org/10.48550/arXiv.1506.04214, 2015. a
Shimura, T., Pringle, W. J., Mori, N., Miyashita, T., and Yoshida, K.: Seamless projections of global storm surge and ocean waves under a warming climate, Geophys. Res. Lett., 49, https://doi.org/10.1029/2021GL097427, 2022. a, b
Steininger, M., Kobs, K., Davidson, P., Krause, A., and Hotho, A.: Density-based weighting for imbalanced regression, Mach. Learn., 110, 2187–2211, https://doi.org/10.1007/s10994-021-06023-5, 2021. a, b, c, d, e
Sun, K. and Pan, J.: Model of storm surge maximum water level increase in a coastal area using ensemble machine learning and explicable algorithm, Earth and Space Science, 10, https://doi.org/10.1029/2023EA003243, 2023. a
Tadesse, M., Wahl, T., and Cid, A.: Data-driven modeling of global storm surges, Frontiers in Marine Science, 7, https://doi.org/10.3389/fmars.2020.00260, 2020. a, b, c, d, e, f, g, h, i, j, k, l, m, n
Tadesse, M. G. and Wahl, T.: A database of global storm surge reconstructions, Scientific Data, 8, https://doi.org/10.1038/s41597-021-00906-x, 2021. a, b
Tausia, J., Delaux, S., Camus, P., Rueda, A., Méndez, F., Bryan, K. R., Pérez, J., Costa, C. G., Zyngfogel, R., and Cofiño, A.: Rapid response data-driven reconstructions for storm surge around New Zealand, Appl. Ocean Res., 133, https://doi.org/10.1016/j.apor.2023.103496, 2023. a
TensorFlow Developers: TensorFlow (v2.18.0-rc0), Zenodo [code], https://doi.org/10.5281/zenodo.5189249, 2024. a
Tiggeloven, T., Couasnon, A., van Straaten, C., Muis, S., and Ward, P. J.: Exploring deep learning capabilities for surge predictions in coastal areas, Sci. Rep.-UK, 11, https://doi.org/10.1038/s41598-021-96674-0, 2021. a, b, c, d, e, f, g, h, i, j, k, l, m, n, o, p, q, r, s
Vousdoukas, M. I., Mentaschi, L., Voukouvalas, E., Verlaan, M., Jevrejeva, S., Jackson, L. P., and Feyen, L.: Global probabilistic projections of extreme sea levels show intensification of coastal flood hazard, Nat. Commun., 9, 2360, https://doi.org/10.1038/s41467-018-04692-w, 2018. a, b, c
Wang, L., Zhang, L., Qi, X., and Yi, Z.: Deep attention-based imbalanced image classification, IEEE T. Neur. Net. Lear., 33, 3320–3330, https://doi.org/10.1109/TNNLS.2021.3051721, 2022. a
Xu, Y., Lin, K., Hu, C., Wang, S., Wu, Q., Zhang, L., and Ran, G.: Deep transfer learning based on transformer for flood forecasting in data-sparse basins, J. Hydrol., 625, https://doi.org/10.1016/j.jhydrol.2023.129956, 2023. a
Zhu, Z., Wang, Z., Dong, C., Yu, M., Xie, H., Cao, X., Han, L., and Qi, J.: Physics informed neural network modelling for storm surge forecasting – a case study in the Bohai Sea, China, Coast. Eng., 197, https://doi.org/10.1016/j.coastaleng.2024.104686, 2025. a
- Abstract
- Introduction
- Methodology
- Performance of the neural networks
- Discussion
- Conclusions
- Appendix A: Sensitivity to predictor data parameters
- Appendix B: Training and evaluation samples
- Appendix C: Neural network architectures
- Appendix D: Supplementary results
- Code availability
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Acknowledgements
- Financial support
- Review statement
- References
- Abstract
- Introduction
- Methodology
- Performance of the neural networks
- Discussion
- Conclusions
- Appendix A: Sensitivity to predictor data parameters
- Appendix B: Training and evaluation samples
- Appendix C: Neural network architectures
- Appendix D: Supplementary results
- Code availability
- Data availability
- Author contributions
- Competing interests
- Disclaimer
- Acknowledgements
- Financial support
- Review statement
- References